Inverse Dynamics
指定した運動に必要なジョイント トルク

ライブラリ:
Robotics System Toolbox /
Manipulator Algorithms
説明
Inverse Dynamics ブロックは、指定したロボットの状態を維持するためにロボットに必要なジョイント トルクを返します。必要なジョイント トルクを得るには、ロボット コンフィギュレーション (ジョイント位置)、ジョイント速度、ジョイント加速度、および外力を指定します。
例

Simulink でのマニピュレーター重力ダイナミクスの計算
マニピュレーター アルゴリズム ブロックを使用して、マニピュレーター ロボットの重力によるダイナミクスを計算および比較する。
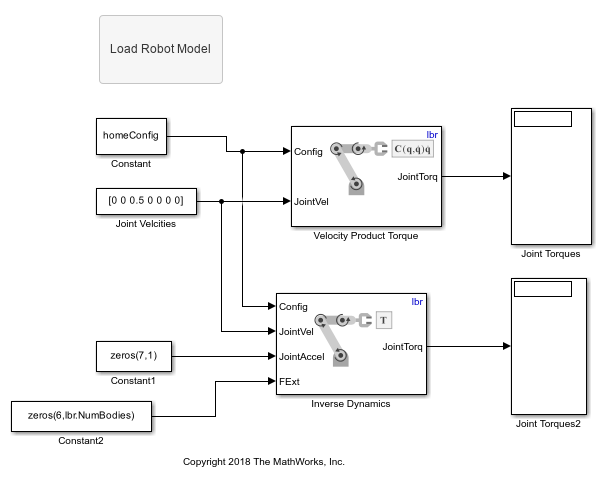
Simulink でのマニピュレーターの速度積の計算
Simulink® のマニピュレーター アルゴリズム ブロックを使用して、マニピュレーターの速度によって誘発されるトルクを計算する。
端子
入力
出力
パラメーター
拡張機能
バージョン履歴
R2018a で導入