Simulink でのマニピュレーターの幾何学的ヤコビアンの計算
この例では、rigidBodyTreeモデルを使用してロボット マニピュレーターの幾何学的ヤコビアンを計算する方法を示します。ヤコビアンは、ジョイント空間の速度を、ベース座標系を基準とするエンドエフェクタの速度にマッピングします。この例では、MATLAB® でロボット モデルおよびロボット コンフィギュレーションを定義し、それらを Simulink® に渡してマニピュレーター アルゴリズム ブロックとともに使用します。
Robot Library から KUKA LBR iiwa 7 ロボットをモデル化する rigidBodyTree オブジェクトを読み込みます。関数 homeConfiguration を使用して、ロボットのホーム コンフィギュレーションまたはホーム ジョイント位置を取得します。関数 randomConfiguration を使用して、指定したジョイント制限内のランダムなコンフィギュレーションを生成します。
lbr = loadrobot("kukaIiwa7", DataFormat="column"); homeConfig = homeConfiguration(lbr); randomConfig = randomConfiguration(lbr);
モデルを開きます。必要に応じて、[Load Robot Model] コールバック ボタンを使用して、ロボット モデルおよびコンフィギュレーション ベクトルを再度読み込みます。どちらのブロックでも、'tool0' ボディがエンドエフェクタとして選択されます。
open_system("get_jacobian_example.slx")
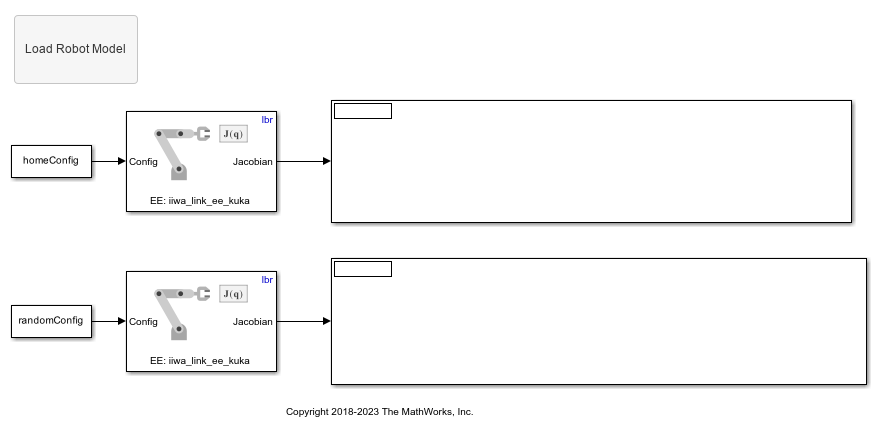
モデルを実行して各コンフィギュレーションのヤコビアンを表示します。