レーダー
レーダー エンジニアリング チームは、MATLAB® および Simulink® を使用して、多機能レーダー システムの設計、解析、シミュレーション、テストを行います。Radar Toolbox を他の MathWorks® 製品と組み合わせることで、開発時間の短縮、設計上の問題の早期解決、また、空中、地上、船上、および車載向けのレーダー システムの解析やテストの合理化を図ることができます。

レーダー システム向けの MathWorks 製品を使用することで、レーダー システムのライフサイクル全体をサポートするモデルを開発することができます。
リンク バジェット解析の実行、アーキテクチャのモデル化、およびシステム設計のトレードオフの評価。
ジオリファレンスされたシナリオの作成、およびレーダー信号、レーダー検出、レーダー追跡のシミュレーションの実行。
異なる波形やフェーズド アレイ フロント エンドに対応した、信号およびデータ処理チェーンの設計。
プロトタイピングおよび展開用の HDL コードまたは C コードの自動生成。
レーダー 向け製品
Radar Toolbox
モノスタティック レーダー、バイスタティック レーダー、および多機能レーダーのシステム設計と解析
Phased Array System Toolbox
フェーズド アレイ システムおよびビームフォーミング システムの設計とシミュレーション
Sensor Fusion and Tracking Toolbox
マルチセンサー トラッキングおよび測位システムの設計、シミュレーション、テスト
Mapping Toolbox
地理情報を解析して可視化
トピック
レーダー システムズ エンジニアリング
- Radar Link Budget Analysis (Radar Toolbox)
Use the Radar Designer app to perform a link budget analysis when designing a radar system. - Radar Architecture: System Components and Requirements Allocation (Part 1) (Radar Toolbox)
Starting from a set of performance requirements, design, implement, and test a radar system in Simulink - Part 1. - Define and Test Tracking Architectures for System-of-Systems (Sensor Fusion and Tracking Toolbox)
This example shows how to define the tracking architecture of a system-of-systems that includes multiple detection-level multi-object trackers and track-level fusion algorithms.
レーダー シナリオのシミュレーション
- Radar Performance Analysis over Terrain (Mapping Toolbox)
The performance of a radar system can depend on its operating environment. This example shows how radar detection performance improves as target elevation increases above the terrain. - Simulate and Track Targets with Terrain Occlusions (Sensor Fusion and Tracking Toolbox)
This example shows you how to model a surveillance scenario in a mountainous region where terrain can occlude both ground and aerial vehicles from the surveillance radar. (R2022a 以降) - Simulated Land Scenes for Synthetic Aperture Radar Image Formation (Radar Toolbox)
Simulate I/Q signals from a synthetic aperture radar (SAR) system that uses platform motion to mimic a longer aperture to improve cross-range resolution using a range migration focusing algorithm. (R2022a 以降)
多機能レーダー
- Adaptive Tracking of Maneuvering Targets with Managed Radar (Radar Toolbox)
Employ radar resource management to efficiently track multiple maneuvering targets and use an interacting multiple model (IMM) filter to estimate when the target is maneuvering to optimize radar revisit times. - Multibeam Radar for Adaptive Search and Track (Radar Toolbox)
UseradarDataGeneratoras part of a closed-loop simulation of a multifunction phased array radar (MPAR) tracking multiple maneuvering targets. (R2022b 以降) - Track Space Debris Using a Keplerian Motion Model (Sensor Fusion and Tracking Toolbox)
This example shows how to model earth-centric trajectories using custom motion models withintrackingScenario, how to configure afusionRadarSensorin monostatic mode to generate synthetic detections of space debris, and how to set up a multi-object tracker to track the simulated targets.
レーダー アンテナ、ビームフォーミング、波形
- Modeling Mutual Coupling in Large Arrays Using Embedded Element Pattern (Phased Array System Toolbox)
Model mutual coupling effects between array elements by using an embedded pattern technique. The example models an array two ways: (1) using the pattern of the isolated element or (2) using the embedded element pattern, and then compares both with the full-wave Method of Moments (MoM)-based solution of the array. - Conventional and Adaptive Beamformers (Phased Array System Toolbox)
Apply three beamforming algorithms to narrowband array data: the phase shift beamformer, the minimum variance distortionless response (MVDR) beamformer, and the linearly constrained minimum variance (LCMV) beamformer. - Radar and Communications Waveform Classification Using Deep Learning (Phased Array System Toolbox)
Classify radar and communications waveforms using the Wigner-Ville distribution (WVD) and a deep convolutional neural network (CNN).
コードの生成と展開
- Rectangular Array MVDR Beamformer (Phased Array System Toolbox)
Implement a minimum-variance distortionless-response (MVDR) beamformer for a 4x4 rectangular antenna array on FPGA. - Processor-in-the-Loop Verification of JPDA Tracker for Automotive Applications (Sensor Fusion and Tracking Toolbox)
Generate embedded code for a JPDA tracker and verify it using processor-in-the-loop (PIL) simulations. (R2022a 以降)
関連情報
注目の例
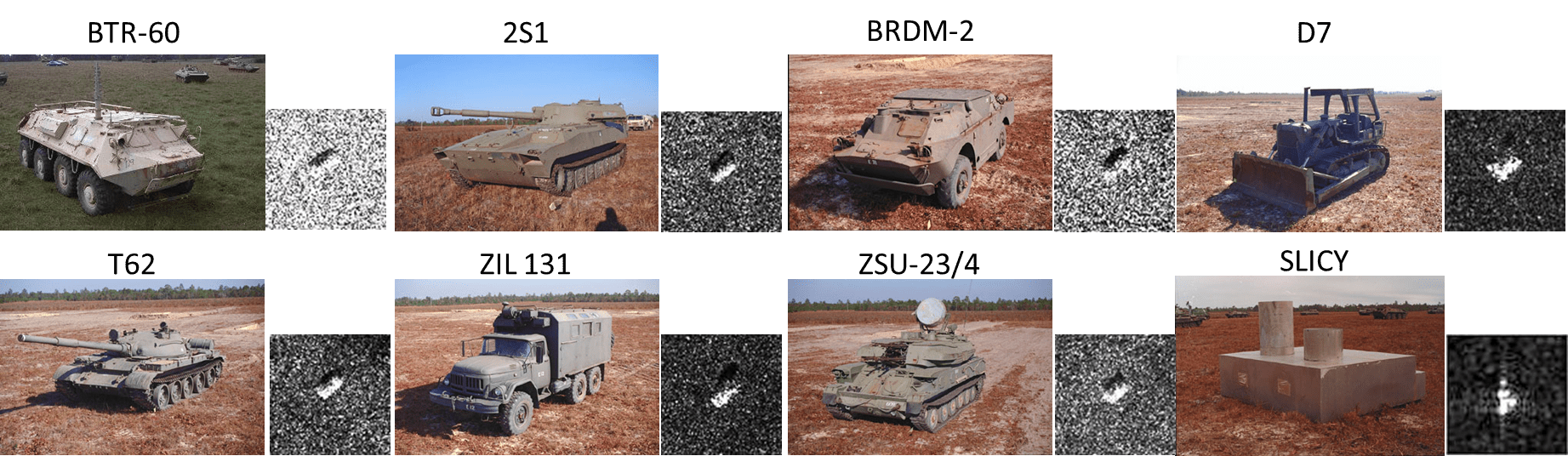
SAR Target Classification Using Deep Learning
Create and train a simple convolution neural network to classify SAR targets using deep learning.
Extended Target Tracking with Multipath Radar Reflections in Simulink
Model and mitigate multipath radar reflections in a highway driving scenario in Simulink similarly to the Highway Vehicle Tracking with Multipath Radar Reflections MATLAB example.

Maritime Clutter Suppression with Neural Networks
Train and evaluate a convolutional neural network to remove clutter returns from maritime radar PPI images using the Deep Learning Toolbox™.

Display Animation of Radar Images over GOES Backdrop
Display a movie of radar images collected once per hour over a backdrop.
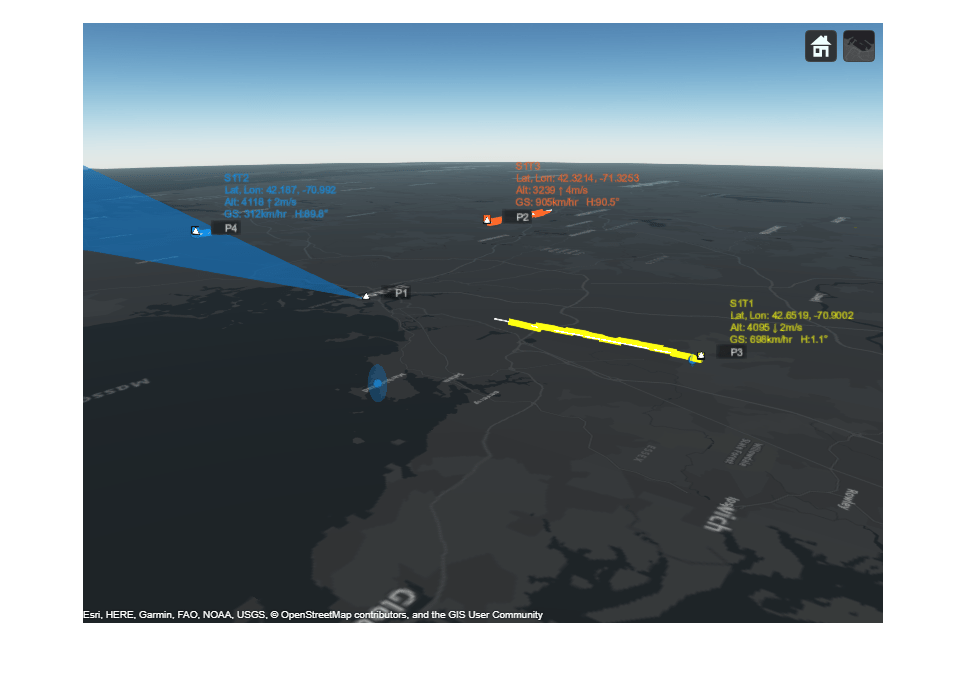
Air Traffic Control
Generate an air traffic control scenario, simulate radar detections from an airport surveillance radar (ASR), and configure a global nearest neighbor (GNN) tracker to track the simulated targets using the radar detections. This enables you to evaluate different target scenarios, radar requirements, and tracker configurations without needing access to costly aircraft or equipment. This example covers the entire synthetic data workflow.

Planning Radar Network Coverage over Terrain
Plan a radar network using propagation modeling over terrain and use the radar equation to determine whether target locations can be detected.