セグメンテーション
"セマンティック セグメンテーション" では、類似特性を使用して 3 次元点群の点がクラスター化され、各点が car、building、ground、vegetation などのクラス ラベルに関連付けられます。
エッジ、近傍点のプロパティ、および直方体、平面、円柱などの幾何学的形状に基づいて、点群をセグメント化できます。セグメンテーション プロセスの詳細については、航空 LiDAR データの地形分類の例を参照してください。
Lidar Toolbox™ の関数は、深層学習を使用したセマンティック セグメンテーションもサポートしています。含まれている事前学習済みの RandLA-Net、Segment Anything モデル (SAM)、PointSeg、SqueezeSegV2、および PointNet++ の畳み込みニューラル ネットワーク (CNN) を使用するか、カスタムのセグメンテーション モデルを開発することができます。RandLA-Net ネットワークを使用したセグメンテーション プロセスの例については、RandLANet 深層学習を使用した航空 LiDAR のセマンティック セグメンテーションを参照してください。

関数
トピック
- Deep Learning with Point Clouds
Learn point cloud processing using deep learning.
- Semantic Segmentation in Point Clouds Using Deep Learning
Assign class labels to each point inside a point cloud using deep learning.
- PointNet++ 入門
PointNet++ ネットワークを定義し、それを使用してセマンティック セグメンテーションおよびオブジェクト分類を実行する。
- Get Started with RandLA-Net
Define a RandLA-Net network and use it to perform semantic segmentation of large-scale point clouds.
- 深層学習用のデータストア (Deep Learning Toolbox)
深層学習アプリケーションでデータストアを使用する方法を学びます。
- 深層学習層の一覧 (Deep Learning Toolbox)
MATLAB® のすべての深層学習層を確認できます。
- Generate RoadRunner Scene Using Aerial Hyperspectral and Lidar Data (Automated Driving Toolbox)
Generate RoadRunner scene from aerial hyperspectral and lidar data.
注目の例

RandLANet 深層学習を使用した航空 LiDAR のセマンティック セグメンテーション
この例では、航空 LiDAR データのセマンティック セグメンテーションを実行するために RandLANet 深層学習ネットワークに学習させる方法を示します。

PointNet++ 深層学習を使用した航空 LiDAR のセマンティック セグメンテーション
この例では、航空 LiDAR データのセマンティック セグメンテーションを実行するために PointNet++ 深層学習ネットワークに学習させる方法を示します。

PointNet++ 深層学習を使用した航空機搭載 LiDAR セマンティック セグメンテーション用のコード生成
この例では、LiDAR セマンティック セグメンテーション用に PointNet++ ネットワークの CUDA® MEX コードを生成する方法を示します。

PointSeg 深層学習ネットワークを使用した LiDAR 点群のセマンティック セグメンテーション
この例では、オーガナイズド 3 次元 LiDAR 点群データで PointSeg セマンティック セグメンテーション ネットワークに学習させる方法を示します。

SqueezeSegV2 深層学習ネットワークを使用した LiDAR 点群のセマンティック セグメンテーション
この例では、オーガナイズド 3 次元 LiDAR 点群データで SqueezeSegV2 セマンティック セグメンテーション ネットワークに学習させる方法を示します。

LiDAR 点群セグメンテーション ネットワーク用のコード生成
この例では、LiDAR セマンティック セグメンテーション用の深層学習ネットワークの CUDA® MEX コードを生成する方法を示します。この例では、3 つのクラス (background、car、truck) に属しているオーガナイズド LiDAR 点群をセグメント化することができる、事前学習済みの SqueezeSegV2 [1] ネットワークが使用されます。ネットワークに学習させる手順については、SqueezeSegV2 深層学習ネットワークを使用した LiDAR 点群のセマンティック セグメンテーションを参照してください。生成された MEX コードは、入力としてひとまとまりの点群を取り、SqueezeSegV2 ネットワーク用の DAGNetwork オブジェクトを使用して点群に対する予測を実行します。

Data Augmentations for Lidar Object Detection Using Deep Learning
Perform typical data augmentation techniques for 3-D object detection workflows with lidar data.

航空 LiDAR データの地形分類
この例では、航空 LiDAR データの地形を地面、建物、および植生としてセグメント化して分類する方法を示します。この例では航空 LiDAR システムで取得された LAZ ファイルを入力として使用します。最初に、LAZ ファイルの点群データを地面と地面以外の点に分類します。その後、地面以外の点を法線と曲率の特徴に基づいて建物と植生の点にさらに分類します。次の図にプロセスの概要を示します。

Classify Land Cover Using Hyperspectral and Lidar Data
Classify land cover using a fusion of hyperspectral and lidar data.
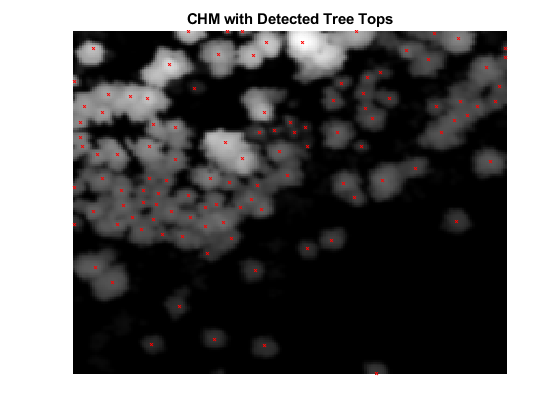
航空 LiDAR データからの個々の樹木の属性および森林のメトリクスの抽出
この例では、航空 LiDAR データから個々の樹木の属性および森林のメトリクスを抽出する方法を示します。