segmentAerialLidarBuildings
Syntax
Description
buildingPtsIdx = segmentAerialLidarBuildings(ptCloud)ptCloud using a pretrained PointNet++ model and returns the building
point indices.
Note
The input point cloud dimensions must be in meters.
This function requires Deep Learning Toolbox™.
[
additionally returns the building points and non-building points as individual
buildingPtsIdx,nonBuildingPtCloud,buildingPtCloud] = segmentAerialLidarBuildings(ptCloud)pointCloud objects.
[___] = segmentAerialLidarBuildings(___,ExecutionEnvironment=
specifies the execution environment for the function in addition to any combination of
arguments from previous syntaxes.env)
Examples
Specify a LAZ file that contains aerial lidar data.
fileName = fullfile(toolboxdir("lidar"),"lidardata","las", ... "aerialLidarData.laz");
Read point cloud data from the LAZ file into the workspace.
lasReader = lasFileReader(fileName); ptCloud = readPointCloud(lasReader);
Segment the building points from the point cloud.
[~,nonBuildingPtCloud,buildingPtCloud] = segmentAerialLidarBuildings(ptCloud);
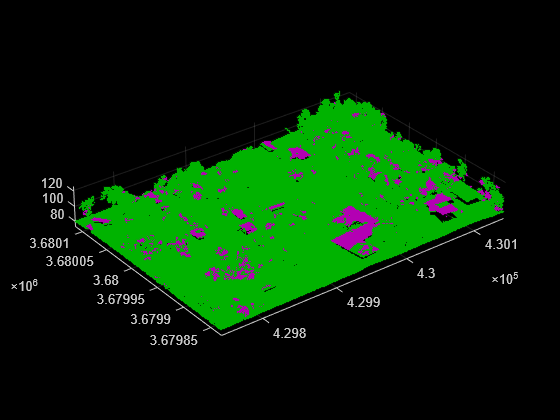
Visualize the building and non-building points.
figure pcshowpair(buildingPtCloud,nonBuildingPtCloud)
Input Arguments
Output Arguments
Version History
Introduced in R2022b