groundTruthLidar
Object for storing labeled lidar data
Description
The groundTruthLidar object contains information about lidar
ground truth labels. The data source used to create the object is a collection of lidar point
cloud data. You can create, export, or import a groundTruthLidar object from
the Lidar Labeler app.
Creation
To export a groundTruthLidar object from the Lidar
Labeler app, on the app toolstrip, select Export > To Workspace. The app exports the object to the MATLAB® workspace. To create a groundTruthLidar object
programmatically, use the groundTruthLidar function (described
here).
Description
gTruth = groundTruthLidar(dataSource,labelDefs,labelData)
dataSourcespecifies the source of the lidar point cloud data and sets theDataSourceproperty.labelDefsspecifies the definitions of region of interest (ROI) and scene labels containing information such asName,Type, andGroup, and sets theLabelDefinitionsproperty.labelDataspecifies the identifying information, position, and timestamps for the marked ROI labels and scene labels, and sets theLabelDataproperty.
Properties
Source of ground truth lidar data, specified as a PointCloudSequenceSource, VelodyneLidarSource,
LasFileSequenceSource, CustomPointCloudSource, or
RosbagSource object. This object contains the information that
describes the source from which the ground truth lidar data was labeled. This table
provides more details about the type of objects that you can specify.
| Object Name | Data Source | Class Reference |
|---|---|---|
PointCloudSequenceSource | Point cloud sequence folder | vision.labeler.loading.PointCloudSequenceSource |
VelodyneLidarSource | Velodyne® packet capture (PCAP) file | vision.labeler.loading.VelodyneLidarSource |
LasFileSequenceSource | LAS or LAZ file sequence folder | lidar.labeler.loading.LasFileSequenceSource |
CustomPointCloudSource | Point cloud data from custom sources | lidar.labeler.loading.CustomPointCloudSource |
RosbagSource | Rosbag file | lidar.labeler.loading.RosbagSource |
This property is read-only.
Label definitions, specified as a table. To create this table, use one of these options.
In the Lidar Labeler app, create label definitions, and then export them as part of a
groundTruthLidarobject.Use a
labelDefinitionCreatorLidarobject to generate a label definitions table. If you save this table to a MAT-file, you can then load the label definitions into a Lidar Labeler app session by selecting Open > Label Definitions from the app toolstrip.Create the label definitions table at the MATLAB command line.
This table describes the required and optional columns of the table specified in the
LabelDefinitions property.
| Column | Description | Required or Optional | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|
Name | Strings or character vectors specifying the name of each label definition. | Required | ||||||||
Type |
| Required | ||||||||
LabelColor | RGB triplets that specify the colors of the label definitions. Values are in the range [0, 1]. The color yellow (RGB triplet [1 1 0]) is reserved for the color of selected labels in the Lidar Labeler app. | Optional When you define labels in the Lidar Labeler app, you must specify a color. Therefore, an exported label definitions table always includes this column. When you create
label definitions using the | ||||||||
Group | Strings or character vectors specifying the group to which each label definition belongs. | Optional If you create the label definitions table at
the MATLAB command line, you do not need to include a
If you export label
definitions from the Lidar Labeler app or create them using a
| ||||||||
Description | Strings or character vectors that describe each label definition. | Optional If you create the label definitions table at
the MATLAB command line, you do not need to include a
If you export label
definitions from the Lidar Labeler app or create them using a
| ||||||||
Hierarchy | Structures containing attribute information for each label definition.
If a label definition does not contain attributes, then the table entry for that label definition is empty. | Optional When you define sublabels or attributes in the
Lidar Labeler app or the
|
This property is read-only.
Label data for each ROI and scene label, specified as a timetable. Each column of LabelData holds labels for a
single label definition and corresponds to the Name value for each
row in LabelDefinitions. The storage format for the label data
depends on the label type.
| Label Type | Storage Format for Labels at Each Timestamp |
|---|---|
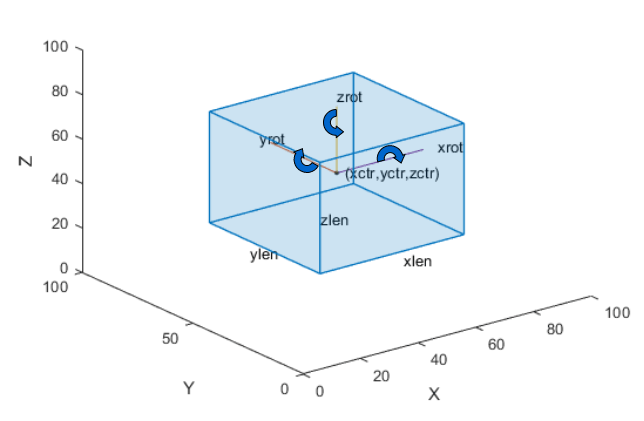
|
The figure shows how these values determine the position of a cuboid.
|
labelType.Scene | Logical vector, where
|
If the Cuboid ROI label data includes attributes, then the labels
at each timestamp must be specified as structures instead. The structure includes these
fields.
| Label Structure Field | Description |
|---|---|
Position | Positions of the parent labels at the given timestamp The format of |
AttributeName1,...,AttributeNameN | Attributes of the parent labels Each defined attribute
has its own field, where the name of the field corresponds to the attribute
name. The attribute value is a character vector for a
|
Object Functions
changeFilePaths | Change file paths in ground truth data |
selectLabels | Select ground truth data by label name or type |
selectLabelsByGroup | Select ground truth data by label group name |
selectLabelsByName | Select ground truth data by label name |
selectLabelsByType | Select ground truth data by label type |
Examples
Version History
Introduced in R2020b