このページの内容は最新ではありません。最新版の英語を参照するには、ここをクリックします。
evaluateSemanticSegmentation
グラウンド トゥルースに対してセマンティック セグメンテーション データ セットを評価する
構文
説明
ssm = evaluateSemanticSegmentation(imageSetConfusion,classNames)classNames をもつ混同行列 imageSetConfusion からのセマンティック セグメンテーションの結果の品質を評価します。
[ は、さまざまなメトリクスを計算し、クラス ssm,blockMetrics] = evaluateSemanticSegmentation(blockSetConfusion,classNames)classNames をもつ混同行列 blockSetConfusion からのブロックベース セマンティック セグメンテーションの結果の品質を評価します。
[___] = evaluateSemanticSegmentation(___, は、評価を制御するために、Name,Value)Name,Value の引数のペアを 1 つ以上使用してセマンティック セグメンテーション メトリクスを計算します。
例
入力引数
名前と値の引数
オプションの引数のペアを Name1=Value1,...,NameN=ValueN として指定します。ここで、Name は引数名で、Value は対応する値です。名前と値の引数は他の引数の後に指定しなければなりませんが、ペアの順序は重要ではありません。
例: metrics = evaluateSemanticSegmentation(pxdsResults,pxdsTruth,Metrics="bfscore") は、各クラス、各イメージ、およびデータ セット全体の平均 BF スコアのみを計算します。
R2021a より前では、コンマを使用して名前と値をそれぞれ区切り、Name を引用符で囲みます。
例: metrics = evaluateSemanticSegmentation(pxdsResults,pxdsTruth,"Metrics","bfscore") は、各クラス、各イメージ、およびデータ セット全体の平均 BF スコアのみを計算します。
計算する semanticSegmentationMetrics のセグメンテーション メトリクス。string のベクトルとして指定します。この引数は、DataSetMetrics、ClassMetrics、および ImageMetrics table のどの変数を計算するかを指定します。ConfusionMatrix および NormalizedConfusionMatrix は、Metrics の値に関係なく計算されます。
| 値 | 説明 | 集計データセット メトリクス | イメージ メトリクス | クラス メトリクス |
|---|---|---|---|---|
"all" | すべてのセマンティック セグメンテーション メトリクスを評価します。 関数への入力として混同行列 ( | すべての集計データセット メトリクス | すべてのイメージ メトリクス | すべてのクラス メトリクス |
"accuracy" | 精度は、各クラスに正しく識別されたピクセルの割合を示します。各クラスがどの程度正しくピクセルを識別するかを知る必要がある場合は、精度メトリクスを使用します。
クラス精度は、グローバル精度に似た簡単なメトリクスですが、誤解を招く可能性があります。たとえば、すべてのピクセルに "自動車" のラベルを付けると、"自動車" クラスに対して完全なスコアが与えられます (ただし、他のクラスのスコアは完全ではありません)。セグメンテーション結果をより完全に評価するには、クラス精度を IoU と合わせて使用します。 | MeanAccuracy | MeanAccuracy | Accuracy |
"bfscore" | Boundary F1 (BF) の輪郭マッチング スコアは、各クラスの予測境界が真の境界にどの程度一致しているかを示します。IoU メトリクスよりも人間の定性評価との相関性が高い傾向のあるメトリクスが必要な場合は、BF スコアを使用します。
詳細については、 関数への入力として混同行列 ( | MeanBFScore | MeanBFScore | MeanBFScore |
"global-accuracy" |
| GlobalAccuracy | GlobalAccuracy | なし |
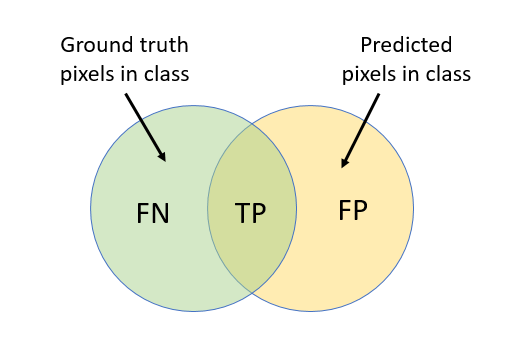
"iou" | Intersection over Union (IoU、別名: Jaccard 類似度係数) は、最も一般的に使用されるメトリクスです。偽陽性にペナルティを課す統計的な精度測定値が必要な場合は、IoU メトリクスを使用します。
詳細については、 | MeanIoU | MeanIoU | IoU |
"weighted-iou" | そのクラスに含まれるピクセル数によって重み付けされた、各クラスの平均 IoU。イメージに不釣り合いなサイズのクラスがある場合、このメトリクスを使用して、集計画質スコアへの小さいクラスの誤差の影響を低減します。 | WeightedIoU | WeightedIoU | なし |
例: ["global-accuracy","iou"] は、データ セット、イメージ、およびクラスのグローバル精度と IoU メトリクスを計算します。
データ型: string
コマンド ウィンドウに評価の進行状況の情報を表示するためのフラグ。1 (true) または 0 (false) として指定します。
表示される情報には、進行状況バー、経過時間、推定の残り時間、およびデータセット メトリクスが含まれます。Verbose が 0 (false) の場合、関数 evaluateSemanticSegmentation は、進行状況を表示せずに、セグメンテーション メトリクスを計算します。
データ型: logical
出力引数
ヒント
関数
evaluateSemanticSegmentationを使用した場合、データセット、クラス、またはイメージ メトリクスのNaNの値は、メトリクスの計算中に 1 つ以上のクラスが欠損していたことを示しています。この場合、ソフトウェアはメトリクスを正確に計算できていません。欠損しているクラスは
ClassMetricsプロパティを調べるとわかります。このプロパティでは各クラスのメトリクスが提供されます。ネットワークをさらに正確に評価するには、欠損しているクラスを含むさらに多くのデータを使用してグラウンド トゥルースを拡張します。
参照
[1] Csurka, G., D. Larlus, and F. Perronnin. "What is a good evaluation measure for semantic segmentation?" Proceedings of the British Machine Vision Conference, 2013, pp. 32.1–32.11.
拡張機能
バージョン履歴
R2017b で導入
参考
関数
semanticseg|plotconfusion(Deep Learning Toolbox) |jaccard|bfscore|segmentationConfusionMatrix
オブジェクト
トピック
- ブロックベースのワークフローにおけるセグメンテーション メトリクスの計算
- 深層学習を使用したセマンティック セグメンテーション入門
- 深層学習用のデータストア (Deep Learning Toolbox)