bfscore
イメージのセグメンテーションのための輪郭マッチング スコア
構文
説明
score = bfscore(prediction,groundTruth)prediction 内の予測セグメンテーションと groundTruth 内のトゥルース セグメンテーションとの間の BF (Boundary F1) 輪郭マッチング スコアを計算します。prediction と groundTruth は、バイナリ セグメンテーションのための logical 配列ペア、あるいはマルチクラス セグメンテーションのためのラベルまたは categorical 配列ペアの可能性があります。
[ は、score,precision,recall] = bfscore(prediction,groundTruth)groundTruth イメージと比較した prediction イメージの精度値および再現率値も返します。
[___] = bfscore( は、指定されたしきい値を距離許容誤差として使用して BF スコアを計算し、境界点が一致するかどうかを判定します。prediction,groundTruth,threshold)
例
セグメント化するオブジェクトを含むイメージを読み取ります。イメージをグレースケールに変換し、結果を表示します。
A = imread('hands1.jpg'); I = im2gray(A); figure imshow(I) title('Original Image')
動的輪郭 (snakes) 法を使用して手をセグメント化します。
mask = false(size(I)); mask(25:end-25,25:end-25) = true; BW = activecontour(I, mask, 300);
グラウンド トゥルース セグメンテーションを読み取ります。
BW_groundTruth = imread('hands1-mask.png');動的輪郭セグメンテーションの BF スコアをグラウンド トゥルースと比較して計算します。
similarity = bfscore(BW, BW_groundTruth);
マスクを重ねて表示します。色はマスクの違いを示します。
figure
imshowpair(BW, BW_groundTruth)
title(['BF Score = ' num2str(similarity)])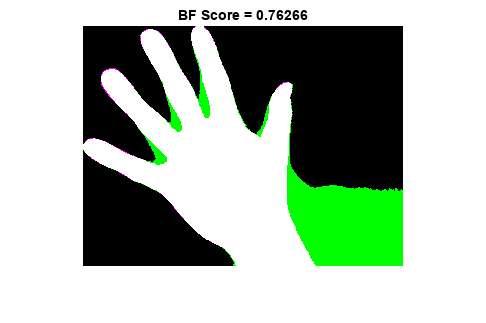
この例では、イメージを複数の領域にセグメント化する方法を説明します。その後、各領域の BF スコアを計算します。
セグメント化する複数の領域を含むイメージを読み取ります。
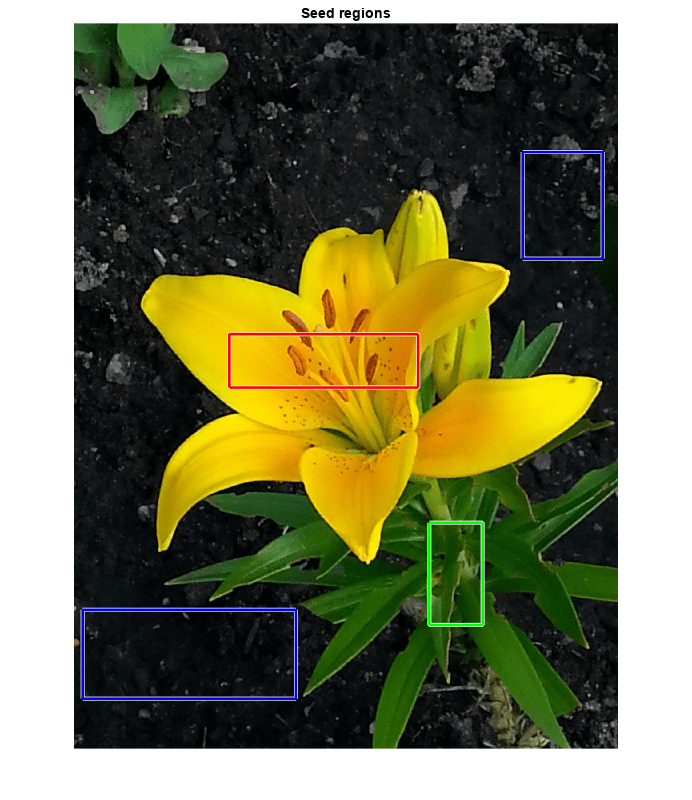
RGB = imread('yellowlily.jpg');典型的な色の特性を区別する 3 つの領域用にスクリブルを作成します。最初の領域には黄色の花が分類されます。2 番目の領域には、緑色の茎および葉が分類されます。最後の領域には、茶色の土が2 つのイメージのパッチに分かれて分類されます。領域は、要素が ROI の左上隅の x 座標と y 座標、ROI の幅、および ROI の高さを示す 4 要素ベクトルで指定されます。
region1 = [350 700 425 120]; % [x y w h] format
BW1 = false(size(RGB,1),size(RGB,2));
BW1(region1(2):region1(2)+region1(4),region1(1):region1(1)+region1(3)) = true;
region2 = [800 1124 120 230];
BW2 = false(size(RGB,1),size(RGB,2));
BW2(region2(2):region2(2)+region2(4),region2(1):region2(1)+region2(3)) = true;
region3 = [20 1320 480 200; 1010 290 180 240];
BW3 = false(size(RGB,1),size(RGB,2));
BW3(region3(1,2):region3(1,2)+region3(1,4),region3(1,1):region3(1,1)+region3(1,3)) = true;
BW3(region3(2,2):region3(2,2)+region3(2,4),region3(2,1):region3(2,1)+region3(2,3)) = true;イメージの上にシード領域を表示します。
figure imshow(RGB) hold on visboundaries(BW1,'Color','r'); visboundaries(BW2,'Color','g'); visboundaries(BW3,'Color','b'); title('Seed regions')
測地線距離ベースの色のセグメンテーションを使用して、イメージを 3 領域にセグメント化します。
L = imseggeodesic(RGB,BW1,BW2,BW3,'AdaptiveChannelWeighting',true);イメージのグラウンド トゥルース セグメンテーションを読み込みます。
L_groundTruth = double(imread('yellowlily-segmented.png'));セグメンテーションの結果をグラウンド トゥルースと視覚的に比較します。
figure imshowpair(label2rgb(L),label2rgb(L_groundTruth),'montage') title('Comparison of Segmentation Results (Left) and Ground Truth (Right)')
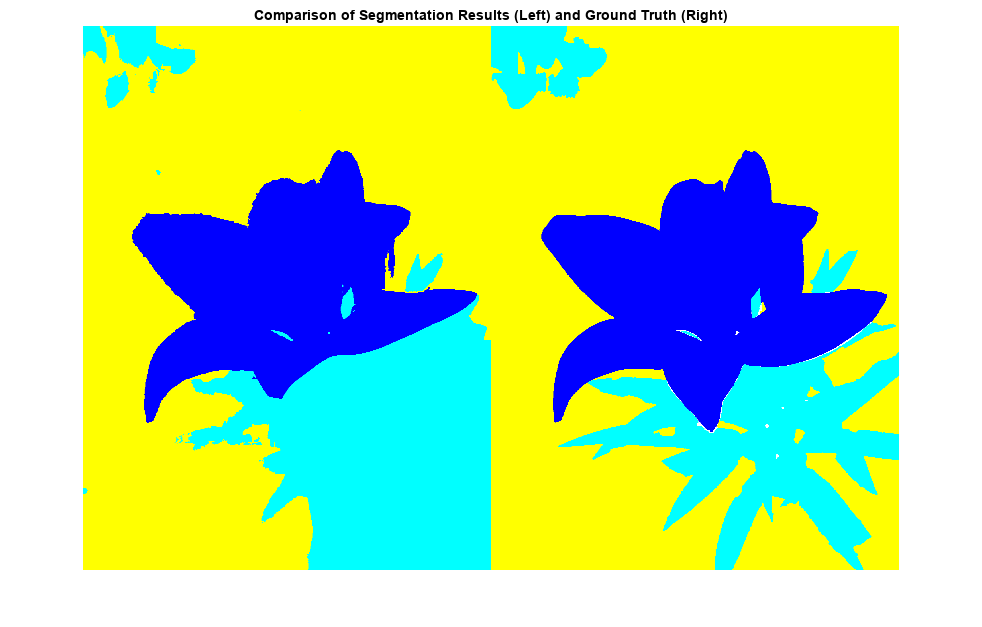
セグメント化された領域ごとに BF スコアを計算します。
similarity = bfscore(L, L_groundTruth)
similarity = 3×1
0.7992
0.5333
0.7466
BF スコアは 2 番目の領域で顕著に小さくなります。この結果は、イメージの右下隅の土を葉として誤って分類するセグメンテーション結果の視覚的な比較と一致しています。
入力引数
出力引数
詳細
参照
[1] Csurka, G., D. Larlus, and F. Perronnin. "What is a good evaluation measure for semantic segmentation?" Proceedings of the British Machine Vision Conference, 2013, pp. 32.1-32.11.