dsp.MedianFilter
メディアン フィルター
説明
dsp.MedianFilter System object™ は、時間の経過に沿って入力信号の移動中央値を各チャネルで個別に計算します。このオブジェクトでは、スライディング ウィンドウ法を使用して移動中央値を計算します。この手法では、各チャネル上で指定の長さのウィンドウをサンプルごとに移動させ、ウィンドウ内のデータの中央値をオブジェクトで計算します。詳細については、アルゴリズムを参照してください。
dsp.MedianFilter オブジェクトと movmedian 関数はどちらも入力信号の移動中央値を計算します。ただ、オブジェクトは大量のリアルタイム データ ストリームを処理し、システム状態を自動的に処理することができます。関数は、すぐに利用可能かつシステム状態を処理できないデータに対して 1 回限りの計算を実行します。両者の比較については、System object と MATLAB 関数を参照してください。
入力の移動中央値を計算するには、次のようにします。
dsp.MedianFilterオブジェクトを作成し、そのプロパティを設定します。関数と同様に、引数を指定してオブジェクトを呼び出します。
System object の機能の詳細については、System object とはを参照してください。
作成
説明
medFilt = dsp.MedianFiltermedFilt を返します。
medFilt = dsp.MedianFilter(Len)WindowLength プロパティを Len に設定します。
medFilt = dsp.MedianFilter(Name,Value) は Name,Value のペアを使用して WindowLength プロパティを指定します。
例:
movMin = dsp.MedianFilter('WindowLength',5);プロパティ
オブジェクト関数
オブジェクト関数を使用するには、System object を最初の入力引数として指定します。たとえば、obj という名前の System object のシステム リソースを解放するには、次の構文を使用します。
release(obj)
例
メディアン フィルターを使用し、ノイズを含む正弦波信号から高周波数ノイズをフィルター処理します。メディアン フィルターのパフォーマンスを平均化フィルターと比較します。
初期化
dsp.MedianFilter オブジェクト medFilt と dsp.MovingAverage オブジェクト movavgWin を設定します。これらのオブジェクトはウィンドウの長さ 7 のスライディング ウィンドウを使用します。出力を表示するための時間スコープを作成します。
Fs = 1000; medFilt = dsp.MedianFilter(7); movavgWin = dsp.MovingAverage(7); scope = timescope('SampleRate',Fs,... 'TimeSpanSource','Property',... 'TimeSpanOverrunAction','Scroll',... 'TimeSpan',1,'ShowGrid',true,... 'YLimits',[-3 3],... 'LayoutDimensions',[3 1],... 'NumInputPorts',3); scope.ActiveDisplay = 1; scope.Title = 'Signal + Noise'; scope.ActiveDisplay = 2; scope.Title = 'Moving Average Output (Window Length = 7)'; scope.ActiveDisplay = 3; scope.Title = 'Median Filter Output (Window Length = 7)'; FrameLength = 256; count = 1; sine = dsp.SineWave('SampleRate',Fs,'Frequency',10,... 'SamplesPerFrame',FrameLength);
ノイズを含む正弦波のフィルター処理
周波数が 10 Hz のノイズを含む正弦波信号を生成します。メディアン フィルターと移動平均オブジェクトを信号に適用します。時間スコープの出力を表示します。
for i = 1:500 hfn = 3 * (rand(FrameLength,1) < 0.02); x = sine() + 1e-2 * randn(FrameLength,1) + hfn; y1 = movavgWin(x); y2 = medFilt(x); scope(x,y1,y2); end
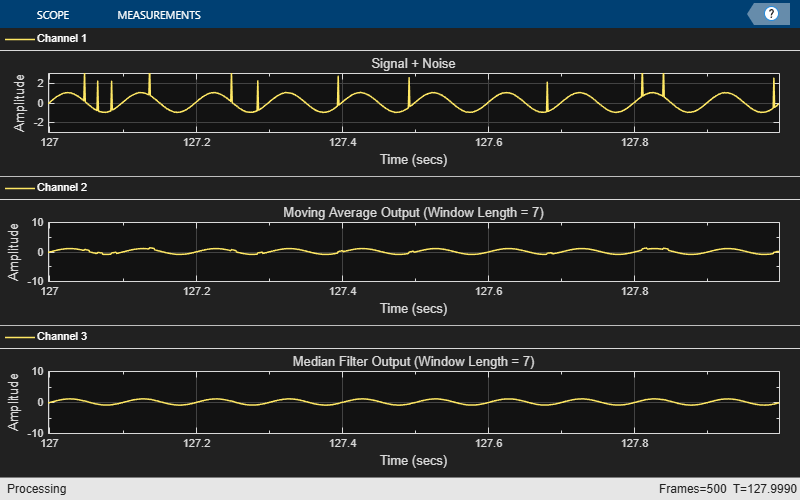
メディアン フィルターは、移動平均オブジェクトよりも効果的に高周波ノイズを除去します。
この例では、dsp.MedianFilter System object を使用して、ストリーミング信号から高周波数の外れ値を除去する方法を説明します。
dsp.MatFileReader System object を使用してジャイロスコープの MAT ファイルを読み取ります。ジャイロスコープの MAT ファイルには 3 列のデータが格納されています。各列には 7140 サンプルが含まれます。3 列はジャイロスコープのモーション センサーからの "X" 軸、"Y" 軸および "Z" 軸を表します。データの各列に含まれるフレーム数が 10 になるようにフレーム サイズ 714 サンプルを選択します。dsp.MedianFilter System object はウィンドウの長さ 10 を使用します。timescope オブジェクトを作成してフィルター処理された出力を表示します。
reader = dsp.MatFileReader('SamplesPerFrame',714,... 'Filename','LSM9DS1gyroData73.mat',... 'VariableName','data'); medFilt = dsp.MedianFilter(10); scope = timescope('NumInputPorts',1,... 'SampleRate',119,... 'YLimits',[-300 300],... 'ChannelNames',{'Input','Filtered Output'},... 'TimeSpanSource','Property',... 'TimeSpan',60,'ShowLegend',true);
dsp.MedianFilter System object を使用して、ジャイロスコープ データをフィルター処理します。フィルター処理された "Z" 軸データを時間スコープに表示します。
for i = 1:10 gyroData = reader(); filteredData = medFilt(gyroData); scope([gyroData(:,3),filteredData(:,3)]); end
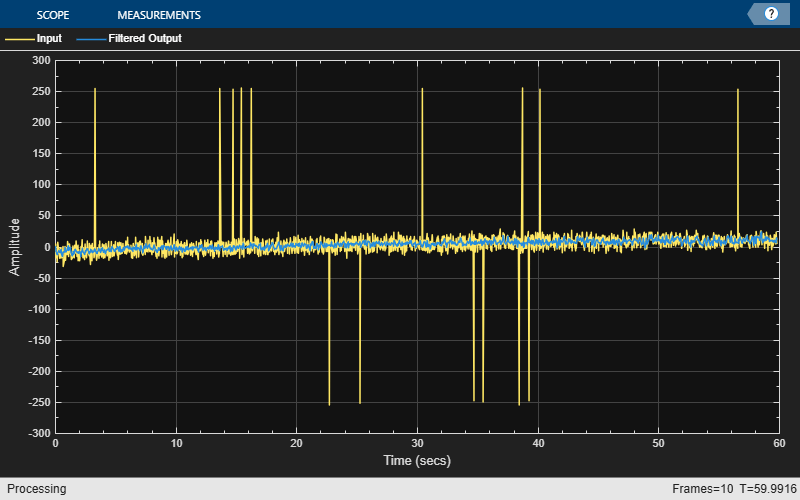
元のデータにはいくつかの外れ値が含まれています。データを拡大し、メディアン フィルターによってすべての外れ値が除去されることを確認します。
アルゴリズム
スライディング ウィンドウ法では、各入力サンプルの出力は現在のサンプルと以前の Len - 1 個のサンプルの中央値になります。Len はサンプルのウィンドウの長さです。最初の Len - 1 個の出力を計算する際にウィンドウにまだ十分なデータがない場合、アルゴリズムはウィンドウをゼロで埋めます。たとえば、2 番目の入力サンプルを受け取った時点で中央値を計算する場合、アルゴリズムはウィンドウを Len - 2 個のゼロで埋めます。この場合、データ ベクトル x は、2 つのデータ サンプルとそれに続く Len - 2 個のゼロで構成されます。このオブジェクトは、入力データのメディアン フィルター処理を経時的に実行します。
スライディング ウィンドウ法を使用してストリーミング入力データの移動中央値を計算する例を考えます。アルゴリズムはウィンドウの長さ 4 を使用します。受け取った各入力サンプルで、長さ 4 のウィンドウがデータに沿って移動します。

参照
[1] Bodenham, Dean. “Adaptive Filtering and Change Detection for Streaming Data.” PH.D. Thesis. Imperial College, London, 2012.
拡張機能
バージョン履歴
R2016b で導入
参考
関数
オブジェクト
dsp.MovingMaximum|dsp.MovingMinimum|dsp.MovingAverage|dsp.MovingRMS|dsp.MovingVariance|dsp.MovingStandardDeviation