dsp.LowpassFilter
FIR または IIR ローパス フィルター
説明
dsp.LowpassFilter オブジェクトは、指定された設計仕様を使用して、経時的に入力の各チャネルを個別にフィルター処理します。FilterType プロパティを 'FIR' または 'IIR' に設定することで、オブジェクトを FIR または IIR ローパス フィルターとして実装できます。
FilterType プロパティが 'FIR' に設定されている場合、このオブジェクトは、dsp.FIRFilter と関数 firceqrip および関数 firgr を使用するための代替として使用できます。dsp.LowpassFilter オブジェクトは 2 つの手順からなるプロセスを 1 つに凝縮します。measure を使用して、設計が指定の仕様を満たすことを確認できます。
入力の各チャネルをフィルター処理するには、次を行います。
dsp.LowpassFilterオブジェクトを作成し、そのプロパティを設定します。関数と同様に、引数を指定してオブジェクトを呼び出します。
System object の機能の詳細については、System object とはを参照してください。
このオブジェクトは、特定の条件下で C/C++ コード生成と SIMD コード生成をサポートします。このオブジェクトは、ARM® Cortex®-M プロセッサおよび ARM Cortex-A プロセッサ用のコード生成もサポートします。詳細については、コード生成を参照してください。
作成
説明
LPF = dsp.LowpassFilter8 kHz、阻止周波数帯域 12 kHz、通過帯域リップル 0.1 dB、阻止帯域の減衰量 80 dB を基準に入力データがフィルター処理されます。
LPF = dsp.LowpassFilter(PropertyName=Value)Name-Value ペアの引数で指定された追加のプロパティをもつローパス フィルターを返します。Name はプロパティ名で、Value は対応する値です。たとえば、PassbandFrequency=8000 は、フィルターの通過帯域の周波数仕様を 8000 Hz に設定します。
プロパティ
オブジェクト関数
オブジェクト関数を使用するには、System object™ を最初の入力引数として指定します。たとえば、obj という名前の System object のシステム リソースを解放するには、次の構文を使用します。
release(obj)
例
44.1 kHz でサンプリングされるデータに対する、最小次数の FIR ローパス フィルターを作成します。8 kHz の通過帯域周波数、12 kHz の阻止帯域周波数、0.1 dB の通過帯域リップル、80 dB の阻止帯域の減衰量を指定します。
Fs = 44.1e3; filtertype = 'FIR'; Fpass = 8e3; Fstop = 12e3; Rp = 0.1; Astop = 80; FIRLPF = dsp.LowpassFilter(SampleRate=Fs,... FilterType=filtertype,... PassbandFrequency=Fpass,... StopbandFrequency=Fstop,... PassbandRipple=Rp,... StopbandAttenuation=Astop);
FIR ローパス フィルターと同じプロパティを設定した、最小次数の IIR ローパス フィルター設計します。クローンしたフィルターの FilterType プロパティを IIR に変更します。
IIRLPF = clone(FIRLPF);
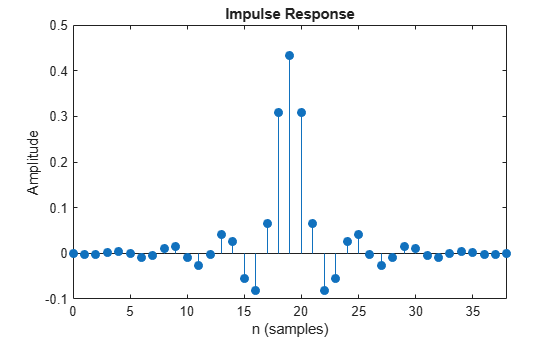
IIRLPF.FilterType = 'IIR';FIR ローパス フィルターのインパルス応答をプロットします。ゼロ次係数は、19 サンプル分遅延されます。これは、フィルターの群遅延と等価です。FIR ローパス フィルターは因果性 FIR フィルターです。
impz(FIRLPF)
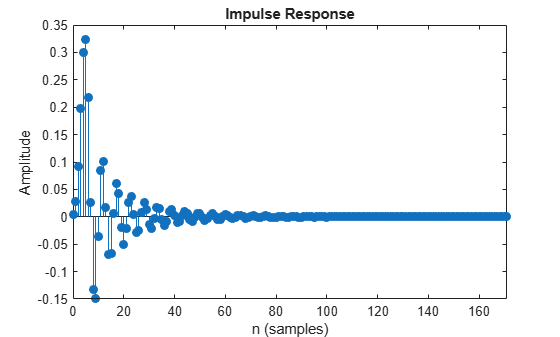
IIR ローパス フィルターのインパルス応答をプロットします。
impz(IIRLPF)
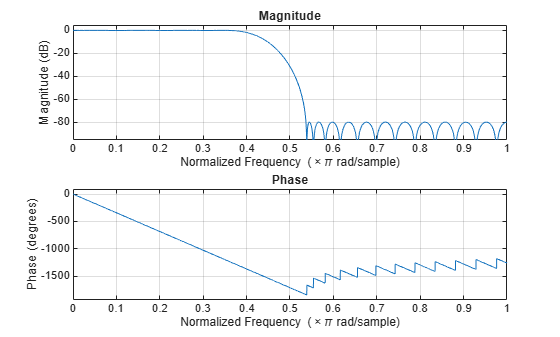
FIR ローパス フィルターの振幅および位相応答をプロットします。
freqz(FIRLPF)
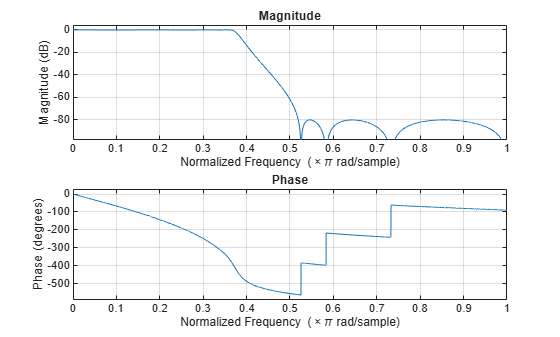
IIR ローパス フィルターの振幅および位相応答をプロットします。
freqz(IIRLPF)
FIR ローパス フィルターの実装コストを計算します。
cost(FIRLPF)
ans = struct with fields:
NumCoefficients: 39
NumStates: 38
MultiplicationsPerInputSample: 39
AdditionsPerInputSample: 38
IIR ローパス フィルターの実装コストを計算します。IIR フィルターのほうが FIR フィルターよりも効率的な実装になります。
cost(IIRLPF)
ans = struct with fields:
NumCoefficients: 18
NumStates: 14
MultiplicationsPerInputSample: 18
AdditionsPerInputSample: 14
FIR ローパス フィルターの群遅延を計算します。
grpdelay(FIRLPF)
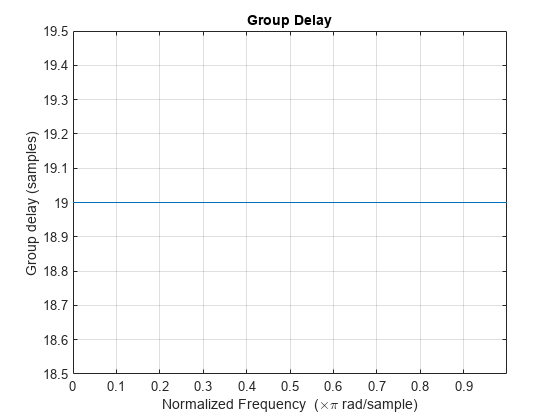
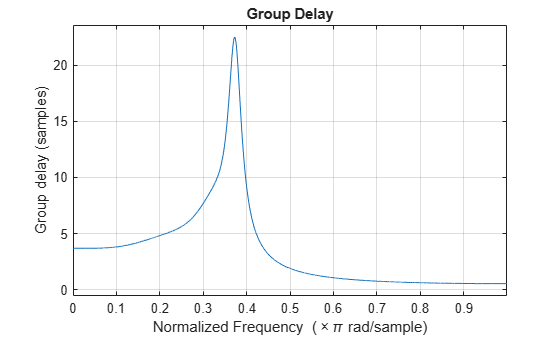
IIR ローパス フィルターの群遅延を計算します。FIR フィルターの群遅延は一定 (線形位相) である一方、IIR の群遅延は一定ではありません。
grpdelay(IIRLPF)
dsp.LowpassFilter System object™ を使用してローパス フィルターを作成します。NormalizedFrequency プロパティを true に設定すると、正規化周波数単位の周波数仕様をもつフィルターが設計されます。
LPF = dsp.LowpassFilter(NormalizedFrequency=true)
LPF =
dsp.LowpassFilter with properties:
FilterType: 'FIR'
DesignForMinimumOrder: true
PassbandFrequency: 0.3628
StopbandFrequency: 0.5442
PassbandRipple: 0.1000
StopbandAttenuation: 80
NormalizedFrequency: true
Show all properties
spectrumAnalyzer オブジェクトを作成して、入力信号と出力信号のスペクトルを可視化します。サンプル レートが 44.1e3 Hz の場合、フィルターの通過帯域周波数と阻止帯域周波数はそれぞれ 8000 Hz と 12000 Hz に変換されます。
SA = spectrumAnalyzer(SampleRate=44.1e3,... PlotAsTwoSidedSpectrum=false,ShowLegend=true,... YLimits=[-150 30],... Title='Input Signal and Output Signal of Lowpass Filter'); SA.ChannelNames = {'Input','Output'};
ローパス フィルターのアルゴリズムを実行して、ホワイト ガウス ノイズ入力信号をフィルター処理します。スペクトル アナライザーを使用して、入力信号と出力信号を確認します。
for k = 1:100 Input = randn(1024,1); Output = LPF(Input); SA([Input,Output]); end

IIR ローパス フィルターを設定します。ホワイト ガウス ノイズのサンプル レートは 44,100 Hz です。フィルターの通過帯域周波数は 8 kHz、阻止帯域周波数は 12 kHz、通過帯域リップルは 0.1 dB、阻止帯域の減衰量は 80 dB です。
Fs = 44.1e3; filtertype = 'IIR'; Fpass = 8e3; Fstop = 12e3; Rp = 0.1; Astop = 80; LPF = dsp.LowpassFilter(SampleRate=Fs,... FilterType=filtertype,... PassbandFrequency=Fpass,... StopbandFrequency=Fstop,... PassbandRipple=Rp,... StopbandAttenuation=Astop);
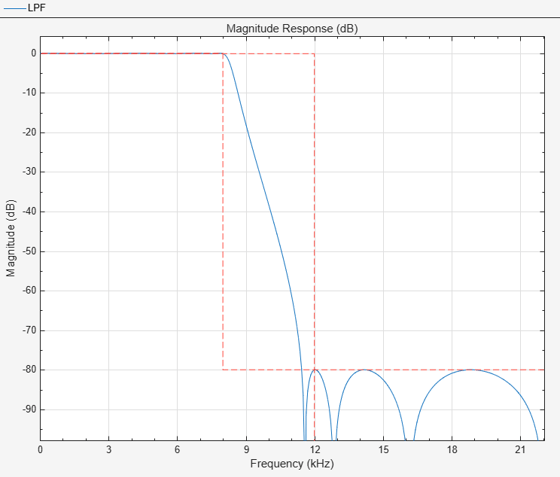
ローパス フィルターの振幅応答を確認します。
filterAnalyzer(LPF)
スペクトル アナライザー オブジェクトを作成します。
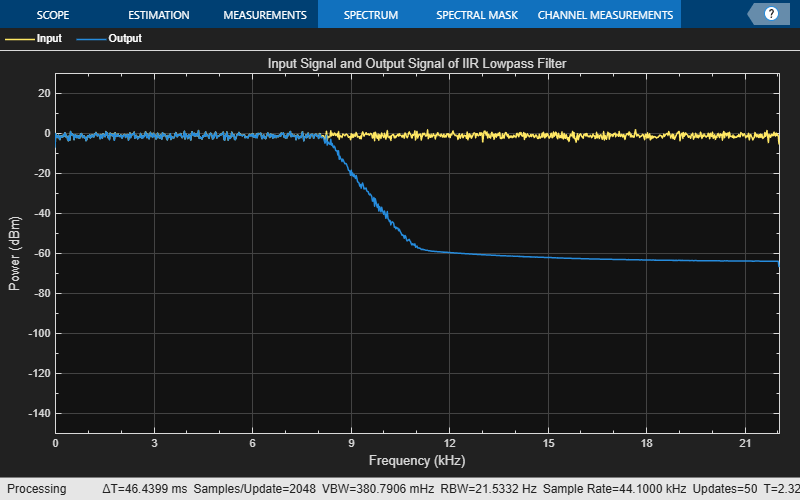
SA = spectrumAnalyzer(SampleRate=Fs,... PlotAsTwoSidedSpectrum=false,... ShowLegend=true,YLimits=[-150 30],... Title='Input Signal and Output Signal of IIR Lowpass Filter'); SA.ChannelNames = {'Input','Output'};
ホワイト ガウス ノイズ入力信号をフィルター処理します。スペクトル アナライザーを使用して、入力信号と出力信号を確認します。
for k = 1:100 Input = randn(1024,1); Output = LPF(Input); SA([Input,Output]); end
ローパス フィルターの周波数応答特性を測定します。既定のプロパティを使用して dsp.LowpassFilter System object を作成します。フィルターの周波数応答特性を測定します。
LPF = dsp.LowpassFilter
LPF =
dsp.LowpassFilter with properties:
FilterType: 'FIR'
DesignForMinimumOrder: true
PassbandFrequency: 8000
StopbandFrequency: 12000
PassbandRipple: 0.1000
StopbandAttenuation: 80
NormalizedFrequency: false
SampleRate: 44100
Show all properties
LPFMeas = measure(LPF)
LPFMeas = Sample Rate : 44.1 kHz Passband Edge : 8 kHz 3-dB Point : 9.0683 kHz 6-dB Point : 9.4977 kHz Stopband Edge : 12 kHz Passband Ripple : 0.099999 dB Stopband Atten. : 80 dB Transition Width : 4 kHz
詳細
アルゴリズム
参照
[1] Shpak, D.J., and A. Antoniou. "A generalized Remez method for the design of FIR digital filters." IEEE® Transactions on Circuits and Systems. Vol. 37, Issue 2, Feb. 1990, pp. 161–174.
[2] Selesnick, I.W., and C. S. Burrus. "Exchange algorithms that complement the Parks-McClellan algorithm for linear-phase FIR filter design." IEEE Transactions on Circuits and Systems. Vol. 44, Issue 2, Feb. 1997, pp. 137–143.
拡張機能
バージョン履歴
R2015a で導入参考
関数
freqz|filterAnalyzer|impz|info|coeffs|cost|grpdelay|measure|firceqrip|firgr|outputDelay|setInputSampleRate