実環境のセンサー データに基づくシナリオ
自動運転アプリケーションでのシナリオ生成とは、全地球測位システム (GPS)、慣性計測ユニット (IMU)、カメラ、および LiDAR の各センサーから記録された実環境車両データから、バーチャル シナリオを作成するプロセスです。Automated Driving Toolbox™ には、シナリオ生成プロセスを自動化する関数とツールが用意されています。センサー データの前処理、道路の抽出、アクターの位置推定、およびアクターの軌跡の取得を行って、実環境シナリオの正確なデジタル ツインを作成します。生成したシナリオをシミュレーションし、実環境データに対して自動運転アルゴリズムをテストします。
Scenario Builder for Automated Driving Toolbox サポート パッケージには、GPS、IMU、カメラ、LiDAR など各種のセンサーを使用して記録された実環境データから、自動的にバーチャル シナリオを作成して可視化するためのツールが用意されています。詳細については、Overview of Scenario Generation from Recorded Sensor Dataを参照してください。
記録したセンサー データからシナリオを生成するには、アドオン エクスプローラーから Scenario Builder for Automated Driving Toolbox サポート パッケージをダウンロードします。アドオンのダウンロードの詳細については、アドオンの取得と管理を参照してください。
アプリ
| 走行ログ アナライザー | Import, visualize, and synchronize real-world driving sensor data (R2025b 以降) |
関数
トピック
はじめに
- Overview of Scenario Generation from Recorded Sensor Data
Learn the basics of generating scenarios from recorded sensor data. - Coordinate Systems for Scenario Generation
Learn the coordinate system used in Scenario Builder for Automated Driving Toolbox support package workflows. - Optional Set Up for Scenario Generation
Learn how to download and install optional third-party software for Scenario Builder for Automated Driving Toolbox support package. - Extract Key Scenario Events from Recorded Sensor Data
Extract key scenario events from recorded sensor data.
シーンの生成
- Generate RoadRunner Scene Using Processed Camera Data and GPS Data
Generate RoadRunner scene using labeled camera images and GPS data. - Generate RoadRunner Scene from Recorded Lidar Data
Generate RoadRunner HD map from recorded lidar data using pretrained deep learning model. - Generate High Definition Scene from Lane Detections and OpenStreetMap
Generate HD road scene using recorded lane detections, GPS data, and OpenStreetMap® data. - Generate RoadRunner Scene with Traffic Signs Using Recorded Sensor Data
Generate RoadRunner scene with traffic signs using recorded sensor data. - Generate RoadRunner Scene Using Aerial Lidar Data
Generate RoadRunner scene from aerial lidar data. - Generate RoadRunner Scene Using Aerial Hyperspectral and Lidar Data
Generate RoadRunner scene from aerial hyperspectral and lidar data. - Georeference Sequence of Point Clouds for Scene Generation
Georeference sequence of point clouds for scene generation. - Transform Aerial Point Cloud for Scene Generation
Georeference aerial point cloud for scene generation.
シナリオの生成
- Preprocess Lane Detections for Scenario Generation
Format lane detection data to update lane specifications for scenario generation. - Smooth GPS Waypoints for Ego Localization
Create jitter-limited ego trajectory by smoothing GPS and IMU sensor data. - Generate Scenario from Actor Track Data and GPS Data
Generate ASAM OpenSCENARIO® v1.0 file using recorded actor tracklist and GPS data. - Extract Vehicle Track List from Recorded Camera Data for Scenario Generation
Extract actor track list from raw camera data for scenario generation. - Extract 3D Vehicle Information from Recorded Monocular Camera Data for Scenario Generation
Extract 3D vehicle information from recorded monocular camera data for scenario generation. - Synchronize GPS, Camera, and Actor Track Data for Scenario Generation
Synchronize multiple recorded sensor data for scenario generation. (R2025a 以降) - Simulate RoadRunner Scenario with Custom 3D Assets Generated from Single-View Camera Images
Simulate RoadRunner scenario with assets from camera images. (R2025a 以降)
注目の例

Generate RoadRunner Scenario from Recorded Sensor Data
Generate RoadRunner Scenario from recorded GPS data and preprocessed actor track list.
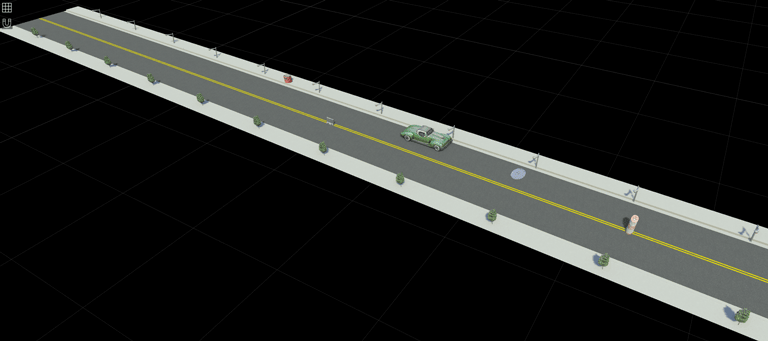
Ego Vehicle Localization Using GPS and IMU Fusion for Scenario Generation
Localize ego vehicle by fusing GPS and IMU sensor data to generate virtual driving scenario.
Ego Localization Using Lane Detections and HD Map for Scenario Generation
Perform lane-level localization of ego vehicle using lane detections, HD map data, and GPS data.
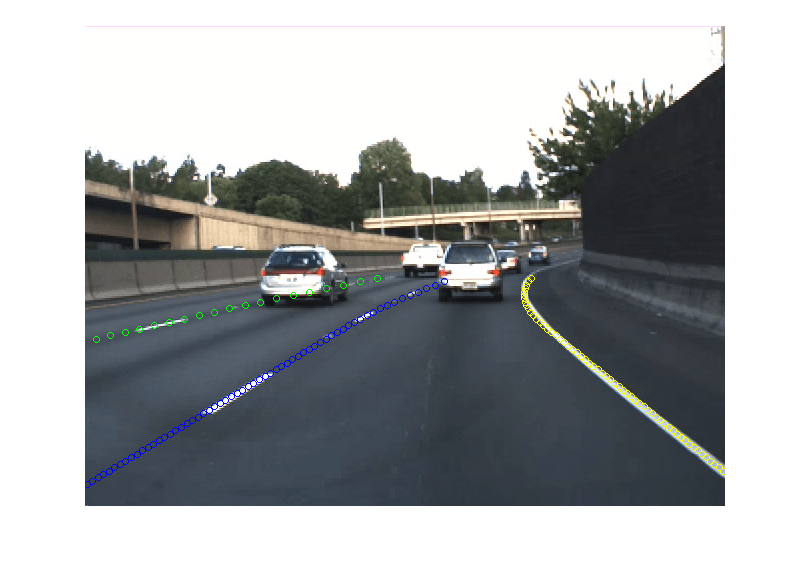
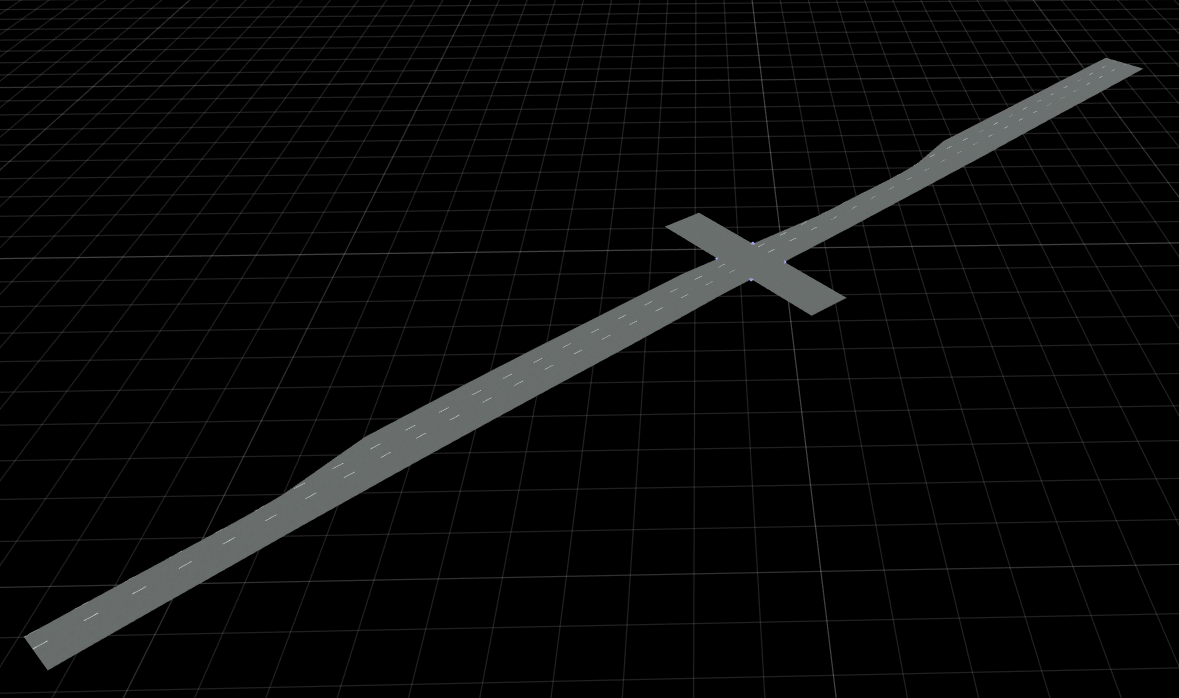
Extract Lane Information from Recorded Camera Data for Scene Generation
Extract lane information from raw camera data to generate ASAM OpenDRIVE® scene or RoadRunner scene.
Generate RoadRunner Scene Using Labeled Camera Images and Raw Lidar Data
Generate road scene with lanes from labeled camera images and raw lidar data.
Extract Vehicle Track List from Recorded Lidar Data for Scenario Generation
Extract actor track list from recorded lidar data using pretrained vehicle detection model and JPDA tracker.

Fuse Prerecorded Lidar and Camera Data to Generate Vehicle Track List for Scenario Generation
Generate scenario by fusing and smoothing tracked lidar data and camera data.
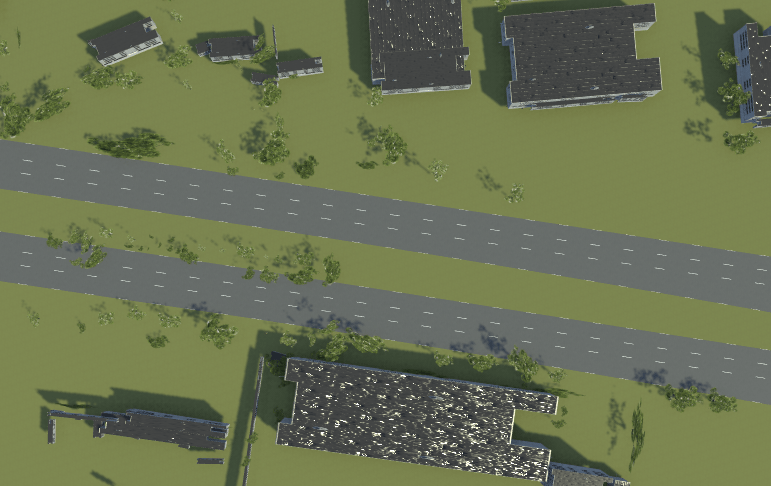
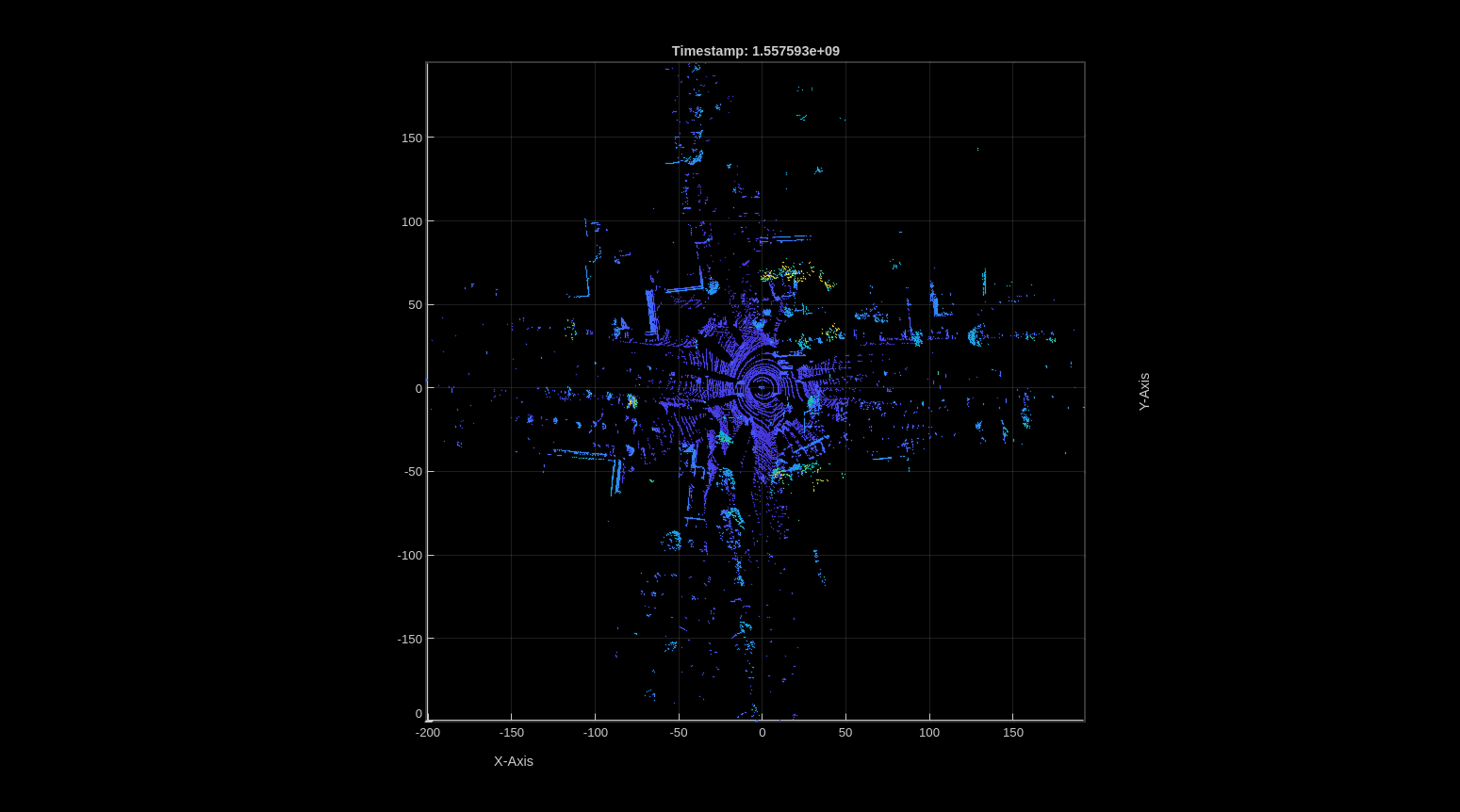
Generate RoadRunner Scene with Trees and Buildings Using Recorded Lidar Data
Generate RoadRunner scene with trees and buildings using recorded lidar data.
Simulate RoadRunner Scenario with Custom 3D Assets Generated from Single-View Camera Images
Simulate RoadRunner scenario with assets from camera images.
Generate ASAM OpenCRG Using Lidar Data
Generate ASAM OpenCRG® file from lidar data