iopzmap
動的システムの入出力ペアの極-零点配置図を既定のオプションを使用してプロット
説明
iopzmap( は、動的システム モデル sys)sys の各入力/出力ペアの極と零点をプロットします。プロットでは、極と零点が x と o でそれぞれ表されます。
モデルの配列に対して、iopzmap は、配列の各モデルの極と零点を、同一の図上にプロットします。
例
1 つの入力、2 つの出力の動的システムを作成します。
H = [tf(-5 ,[1 -1]); tf([1 -5 6],[1 1 0])];
極-零点配置図をプロットします。
iopzmap(H)
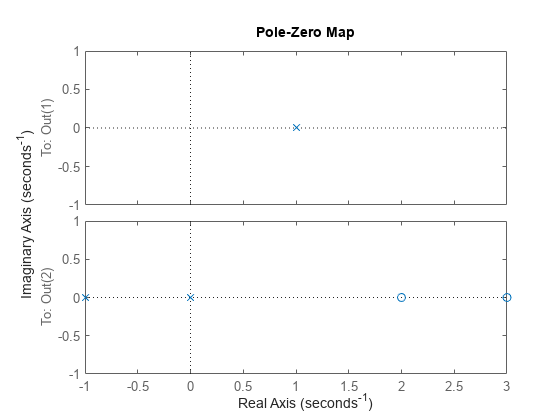
iopzmap は、システムの各 I/O ペアに対して個別の配置図を生成します。
入出力データから推定された、過剰にパラメーター化された状態空間モデルの極と零点を表示します (System Identification Toolbox™ が必要)。
load iddata1 sys = ssest(z1,6,ssestOptions('focus','simulation')); iopzmap(sys)
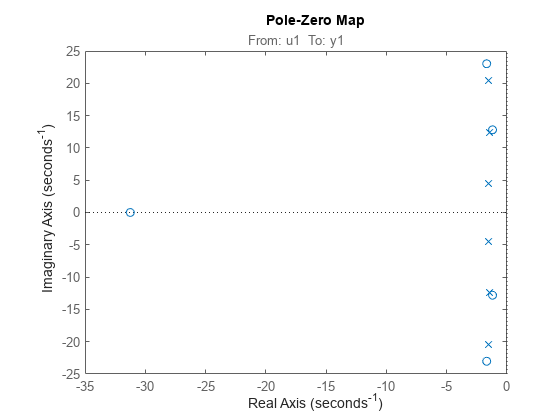
このプロットは、ほぼ重複する 2 つの極-零点のペアがあり、冗長の可能性があることを示しています。
入力引数
ヒント
極-零点プロットの外観をカスタマイズする追加オプションには、
iopzplotを使用します。iopzmapを使用して作成されたプロットは、複数行のタイトルや、string 配列または文字ベクトルの cell 配列として指定されたラベルをサポートしません。複数行のタイトルやラベルを指定するには、newline文字を含む単一の string を使用します。iopzmap(sys) title("first line" + newline + "second line");