PID 調整器による PID コントローラーの設計
Control System Toolbox™ では、PID 調整器を使用して、LTI モデルで表されたプラント用の PID コントローラーを対話的に自動調整できます。
Simulink® モデルの PID Controller ブロックの PID 調整器による調整の詳細については、Simulink でのモデルベースの PID 調整の紹介 (Simulink Control Design)を参照してください。
PID 調整器の概要
PID 調整器を使用して、単一ループ、負のフィードバック制御構成の SISO PID コントローラーを対話形式で設計します。

PID 調整器は、プラントのコントローラーを自動的に設計します。ユーザーはコントローラーのタイプ (P、 I、 PI、 PD、 PDF、PID、PIDF) と形式 (平行または標準) を指定します。
PID 調整器を使用して、次の図のフィードバック構成用に 2-DOF PID コントローラーを設計することもできます。

PID 調整器は、設定点の重みを自由で調整可能なパラメーターにできる 2-DOF PID コントローラーを設計できます。また、PID 調整器では、I-PD や PI-D などの一般的な制御構成で設定点の重みが固定されているコントローラーを設計することもできます。
さまざまな応答プロットを使った設計を解析することができます、また設計を対話形式で調整して、ユーザーの性能要件を満たすことができます。
PID 調整器を起動するには、pidTuner コマンドを使用します。
pidTuner(sys,type)
ここで、sys は制御するプラントの線形モデルで、type は設計するコントローラーのタイプを示します。
または、以下を入力します。
pidTuner(sys,Cbase)
ここで、 Cbase はベースライン コントローラーであり、設計したコントローラーの性能を Cbase の性能と比較できます。
sys と Cbase の詳細は、pidTuner のリファレンス ページを参照してください。
メモ
MATLAB® デスクトップの [アプリ] タブから PID 調整器を開くこともできます。その場合、PID 調整器の [Plant] メニューを使用して、プラント モデルを指定します。
PID コントローラーのタイプ
コントローラーのタイプを選択するには、以下のいずれかの方法を使用します。
アプリを開くときにタイプを指定する — PID 調整器を開く際、
type引数をpidTunerコマンドに入力します。たとえば、pidTuner(G,'PIDF2')は PID 調整器を、微分項にフィルターが付いた 2-DOF PID コントローラーという初期設計で開きます。既存のコントローラー オブジェクトでタイプを指定する — PID 調整器を開く際、ベースライン コントローラーの
Cbase引数をpidTunerコマンドに入力します。PID 調整器はCbaseと同じタイプのコントローラーを設計します。たとえば、C0が比例と微分の動作のみをもつpidコントローラー オブジェクト (PD コントローラー) であるとします。この場合、pidTuner(G,C0)は、PID 調整器を PD コントローラーという初期設計で開きます。アプリ内でタイプを指定する — PID 調整器で、[タイプ] メニューを使用してコントローラーのタイプを変更します。
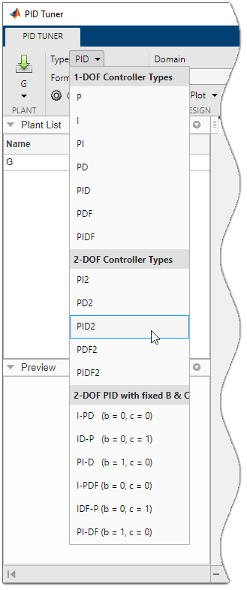
次の表は、使用可能な PID コントローラーのタイプをまとめたものです。これらのコントローラー タイプについての詳細は、調整における PID コントローラー タイプを参照してください。
1-DOF コントローラー
pidTuner への type 入力 | [タイプ] メニューでエントリ | コントローラーの動作 |
|---|---|---|
'P' | P | 比例のみ |
'I' | I | 積分のみ |
'PI' | PI | 比例と積分 |
'PD' | PD | 比例と微分 |
'PDF' | PDF | 微分項に 1 次フィルターをもつ比例と微分 |
'PID' | PID | 比例、積分、および微分 |
'PIDF' | PIDF | 微分項に 1 次フィルターをもつ比例、積分、および微分 |
2-DOF コントローラー
PID 調整器は、設定点の重みが自由な 2-DOF PID コントローラー タイプを自動で設計できます。次の表は、PID 調整器における 2-DOF コントローラーのタイプをまとめています。2-DOF PID コントローラー一般についての詳細は、2 自由度 PID コントローラーを参照してください。
pidTuner への type 入力 | [タイプ] メニューでエントリ | コントローラーの動作 |
|---|---|---|
'PI2' | PI2 | 2-DOF の比例および積分 |
'PD2' | PD2 | 2-DOF の比例および微分 |
'PDF2' | PDF2 | 微分項に 1 次フィルターをもつ 2-DOF の比例および微分 |
'PID2' | PID2 | 2-DOF の比例、積分および微分 |
'PIDF2' | PIDF2 | 微分項に 1 次フィルターをもつ 2-DOF の比例、積分および微分 |
設定点の重みが固定された 2-DOF コントローラー
PID 調整器を使用して、次の表にまとめられている、設定点の重みが固定されたコントローラー タイプを設計します。これらのコントローラー タイプについての詳細は、調整における PID コントローラー タイプを参照してください。
pidTuner への type 入力 | [タイプ] メニューでエントリ | コントローラーの動作 |
|---|---|---|
'I-PD' | I-PD | b = 0、c = 0 の 2-DOF PID |
'I-PDF' | I-PDF | b = 0、c = 0 の 2-DOF PIDF |
'ID-P' | ID-P | b = 0、c = 1 の 2-DOF PID |
'IDF-P' | IDF-P | b = 0、c = 1 の 2-DOF PIDF |
'PI-D' | PI-D | b = 1、c = 0 の 2-DOF PID |
'PI-DF' | PI-DF | b = 1、c = 0 の 2-DOF PIDF |
離散時間コントローラー タイプ
sys がサンプル時間 Ts の離散時間モデルである場合、PID 調整器では ForwardEuler 離散積分器の式を使用して離散時間 pid のコントローラーを設計します。異なる離散積分器の式をもつコントローラーを設計するには、以下のいずれかの方法を使用できます。
離散時間ベースライン コントローラー
Cbaseを起動コマンドpidTunerに入力します。PID 調整器は、Cbaseと同じ離散積分器の式をもつコントローラーを設計します。PID 調整器を起動した後、[オプション] をクリックして [コントローラーのオプション] ダイアログ ボックスを開きます。[積分公式] と [微分公式] メニューから離散積分器の式を選択します。
離散積分器の式の詳細は、pid、pid2、pidstd および pidstd2 のリファレンス ページを参照してください。
PID コントローラーの形式
pidTuner に対して type 入力を使用する場合、PID 調整器は並列形式でコントローラーを設計します。標準形式でコントローラーを設計するには、以下の方法の 1 つを使用します。
標準形式のベースライン コントローラー
Cbaseを起動コマンドpidTunerに入力します。PID 調整器は、Cbaseと同じ形式をもつコントローラーを設計します。[形式] メニューを使用して、PID 調整器を起動した後、コントローラーの形式を変更します。
並列および標準コントローラー形式についての詳細は、pid、pid2、pidstd および pidstd2 のリファレンス ページを参照してください。