comm.MSKModulator
MSK 法を使用した変調
説明
comm.MSKModulator System object™ は、最小偏移変調法を使用して変調します。出力は、変調信号のベースバンド表現です。詳細については、アルゴリズムを参照してください。
最小偏移変調を変調するには、以下の手順に従います。
comm.MSKModulatorオブジェクトを作成し、そのプロパティを設定します。関数と同様に、引数を指定してオブジェクトを呼び出します。
System object の機能の詳細については、System object とはを参照してください。
作成
プロパティ
オブジェクト関数
オブジェクト関数を使用するには、System object を最初の入力引数として指定します。たとえば、obj という名前の System object のシステム リソースを解放するには、次の構文を使用します。
release(obj)
例
MSK 変調器、AWGN チャネル、および MSK 復調器を作成します。 の位相オフセットを使用します。
mskmodulator = comm.MSKModulator( ... BitInput=true, ... InitialPhaseOffset=pi/4); awgn = comm.AWGNChannel( ... NoiseMethod='Signal to noise ratio (SNR)', ... SNR=0); mskdemodulator = comm.MSKDemodulator( ... BitOutput=true, ... InitialPhaseOffset=pi/4);
エラー レート計算機を作成します。ビタビ アルゴリズムによって発生する遅延を考慮します。
ber = comm.ErrorRate(ReceiveDelay=mskdemodulator.TracebackDepth);
3 ビットのワードを 100 個送信します。
for counter = 1:100 data = randi([0 1],300,1); modSignal = mskmodulator(data); noisySignal = awgn(modSignal); receivedData = mskdemodulator(noisySignal); errorStats = ber(data, receivedData); end fprintf('Error rate = %f\nNumber of errors = %d\n', ... errorStats(1), errorStats(2))
Error rate = 0.000000 Number of errors = 0
0 と 1 のバイナリ シーケンスを MSK 変調器の出力にマッピングします。このマッピングは GMSK 変調にも適用されます。
バイナリ入力を受け入れる MSK 変調器を作成し、シンボルあたりのサンプル数の値を 1 にします。
mskmodulator = comm.MSKModulator(BitInput=true, SamplesPerSymbol=1);
すべて 0 の入力シーケンスを作成します。シーケンスを変調します。
x = zeros(5,1); y = mskmodulator(x)
y = 5×1 complex
1.0000 + 0.0000i
0.0000 - 1.0000i
-1.0000 - 0.0000i
-0.0000 + 1.0000i
1.0000 + 0.0000i
各点の位相角を決定します。関数 unwrap を使用してトレンドを表示します。
theta = unwrap(angle(y))
theta = 5×1
0
-1.5708
-3.1416
-4.7124
-6.2832
0 のシーケンスにより、サンプル間で位相が シフトします。
変調器をリセットします。すべて 1 の入力シーケンスを変調します。
reset(mskmodulator) x = ones(5,1); y = mskmodulator(x)
y = 5×1 complex
1.0000 + 0.0000i
0.0000 + 1.0000i
-1.0000 + 0.0000i
-0.0000 - 1.0000i
1.0000 - 0.0000i
各点の位相角を決定します。関数 unwrap を使用してトレンドを表示します。
theta = unwrap(angle(y))
theta = 5×1
0
1.5708
3.1416
4.7124
6.2832
1 のシーケンスにより、サンプル間で位相が シフトします。
パルス長の異なるガウス最小偏移変調 (GMSK) および最小偏移変調 (MSK) のアイ ダイアグラムをプロットして GMSK および MSK の変調スキームを比較します。
シンボル変数あたりのサンプルを設定します。
sps = 8;
ランダムなバイナリ データを生成します。
data = randi([0 1],1000,1);
バイナリ入力を受け入れる GMSK 変調器および MSK 変調器を作成します。GMSK 変調器の PulseLength プロパティを 1 に設定します。
gmskMod = comm.GMSKModulator( ... BitInput=true, ... PulseLength=1, ... SamplesPerSymbol=sps); mskMod = comm.MSKModulator( ... BitInput=true, ... SamplesPerSymbol=sps);
GMSK 変調器および MSK 変調器を使用してデータを変調します。
modSigGMSK = gmskMod(data); modSigMSK = mskMod(data);
SNR が 30 dB の AWGN チャネル経由で変調信号を渡します。
rxSigGMSK = awgn(modSigGMSK,30); rxSigMSK = awgn(modSigMSK,30);
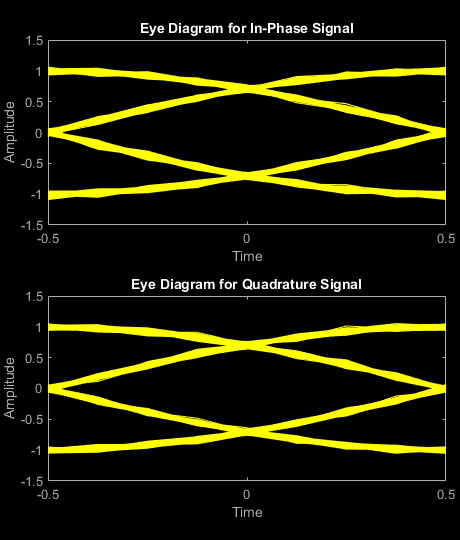
関数eyediagramを使用して、ノイズを含む信号のアイ ダイアグラムをプロットします。GMSK パルスの長さを 1 に設定すると、アイ ダイアグラムはほぼ同じになります。
eyediagram(rxSigGMSK,sps,1,sps/2)
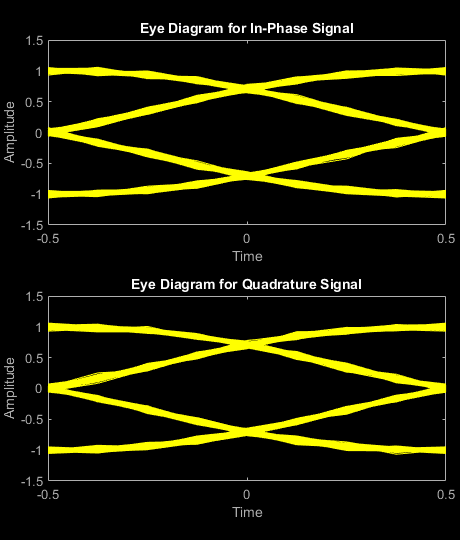
eyediagram(rxSigMSK,sps,1,sps/2)
GMSK 変調器オブジェクトの PulseLength プロパティを 3 に設定します。プロパティは調整不可能であるため、最初にオブジェクトを解放する必要があります。
release(gmskMod) gmskMod.PulseLength = 3;
更新した GMSK 変調器オブジェクトを使用して変調信号を生成し、生成した変調信号を AWGN チャネル経由で渡します。
modSigGMSK = gmskMod(data); rxSigGMSK = awgn(modSigGMSK,30);
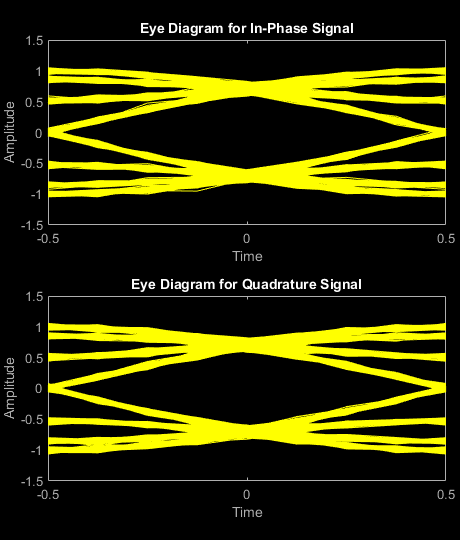
GMSK などの連続位相変調 (CPM) 波形では、波形は前のシンボルや現在のシンボルの値に依存します。パルスの長さが長くなるとアイ ダイアグラムのパスの数が増加することを確認するために、GMSK 信号のアイ ダイアログラムをプロットします。
eyediagram(rxSigGMSK,sps,1,sps/2)
GMSK 変調器オブジェクトの PulseLength プロパティを他の値に変更して実験できます。プロパティを偶数に設定した場合、変調信号をわかりやすく表示するために gmskMod.InitialPhaseOffset を pi/4 に、関数 eyediagram のオフセット引数を sps/2 から 0 に更新する必要があります。ガウス パルス整形をよりわかりやすく表示するには、View CPM Phase Tree Using Simulinkの例で説明したように、信号の位相を表示するスコープを使用しなければなりません。
アルゴリズム
差分符号化最小偏移変調変調は、パルス整形を使用して、変調信号の位相遷移を平滑化します。関数 q(t) は、 の関係によって周波数パルス g(t) から得られる位相応答です。
指定された周波数パルス整形は、g(t) の次の矩形パルス整形式に対応します。
| パルス整形 | 式 |
|---|---|
Rectangular |
L は、シンボル区間におけるメイン ローブ パルス存続時間です。
パルスの持続時間 LT は、シンボル区間におけるパルス長です。