このページの内容は最新ではありません。最新版の英語を参照するには、ここをクリックします。
comm.CPMModulator
CPM 法を使用した信号の変調
説明
comm.CPMModulator System object™ は、連続位相変調 (CPM) 方式を使用して入力信号を変調します。出力は、変調信号のベースバンド表現です。変調および適用されるフィルター処理の詳細については、CPM 法およびパルス整形のフィルター処理を参照してください。
CPM 法を使用して信号を変調するには、次のようにします。
comm.CPMModulatorオブジェクトを作成し、そのプロパティを設定します。関数と同様に、引数を指定してオブジェクトを呼び出します。
System object の機能の詳細については、System object とはを参照してください。
作成
構文
説明
cpmmod = comm.CPMModulator は、CPM 法を使用して入力信号を変調する変調器 System object を作成します。
cpmmod = comm.CPMModulator( は、名前と値の引数を 1 つ以上使用してプロパティを設定します。たとえば、Name=Value)comm.CPMModulator(SymbolMapping='Gray') は、変調されたシンボルに対してグレイ符号順のシンボル マッピングを指定します。
cpmmod = comm.CPMModulator( は、M,Name=Value)ModulationOrder プロパティを M に設定し、オプションで名前と値の引数を設定します。
プロパティ
オブジェクト関数
オブジェクト関数を使用するには、System object を最初の入力引数として指定します。たとえば、obj という名前の System object のシステム リソースを解放するには、次の構文を使用します。
release(obj)
例
CPM 変調器 System object と CPM 復調器 System object を作成します。
cpmmodulator = comm.CPMModulator(8, ... 'BitInput',true, ... 'SymbolMapping','Gray'); cpmdemodulator = comm.CPMDemodulator(8, ... 'BitOutput',true, ... 'SymbolMapping','Gray');
エラー レート計算機 System object™ を作成します。これはビタビ アルゴリズムによって発生する遅延を考慮します。
delay = log2(cpmdemodulator.ModulationOrder) ... * cpmdemodulator.TracebackDepth; errorRate = comm.ErrorRate('ReceiveDelay',delay);
3 ビットのワードを 100 個送信し、エラー レートの結果を出力します。
for counter = 1:100 data = randi([0 1],300,1); modSignal = cpmmodulator(data); noisySignal = awgn(modSignal,0); receivedData = cpmdemodulator(noisySignal); errorStats = errorRate(data,receivedData); end fprintf('Error rate = %f\nNumber of errors = %d\n', ... errorStats(1),errorStats(2))
Error rate = 0.004474 Number of errors = 134
comm.CPMModulatorとcomm.CPMDemodulatorSystem object を使用して、ガウス周波数偏移変調 (GFSK) の変調と復調をランダム ビット データに適用します。
GFSK の変調器と復調器のペアを作成します。
gfskMod = comm.CPMModulator( ... 'ModulationOrder',2, ... 'FrequencyPulse','Gaussian', ... 'BandwidthTimeProduct',0.5, ... 'ModulationIndex',1, ... 'BitInput',true); gfskDemod = comm.CPMDemodulator( ... 'ModulationOrder',2, ... 'FrequencyPulse','Gaussian', ... 'BandwidthTimeProduct',0.5, ... 'ModulationIndex',1, ... 'BitOutput',true);
ランダム ビット データを生成して GFSK 変調を適用します。散布図を使用してコンスタレーションを表示します。
numSym = 100; x = randi([0 1],numSym*gfskMod.SamplesPerSymbol,1); y = gfskMod(x); eyediagram(y,16)

GFSK 変調されたデータを復調します。復調された信号データが元のデータと等しいことを検証するには、GFSK の変調と復調のプロセスでガウス フィルター処理によって発生する遅延を考慮します。
z = gfskDemod(y); delay = finddelay(x,z); isequal(x(1:end-delay),z(delay+1:end))
ans = logical
1
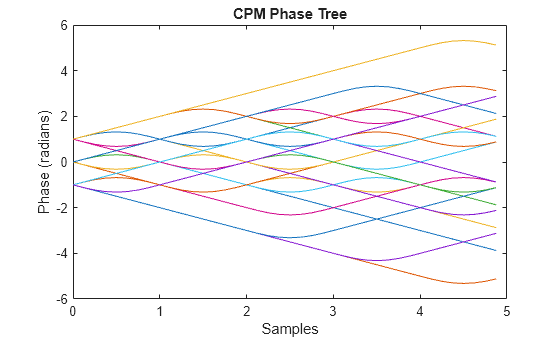
連続位相変調 (CPM) を適用した信号の位相ツリー ダイアグラムをプロットします。"位相ツリー ダイアグラム" は時間の経過に伴う変調信号の位相をプロットした曲線を多数重ね合わせたものです。明確な曲線は、変調器へのさまざまな入力から生成されます。この例では、CPM 変調器の設定を定義し、シンボル マッピングを適用して、結果をプロットします。各曲線は、識別可能な (定数) 入力信号による CPM 変調器のシミュレーションの異なるインスタンスを表します。
例で使用するパラメーターを定義し、CPM 変調器 System object™ を作成します。
M = 2; % Modulation order modindex = 2/3; % Modulation index sps = 8; % Samples per symbol L = 5; % Symbols to display pmat = zeros(L*sps,M^L); % Empty phase matrix cpm = comm.CPMModulator(M, ... ModulationIndex=modindex, ... FrequencyPulse="Raised Cosine", ... PulseLength=2, ... SamplesPerSymbol=sps);
for ループを使用して、0 が -(M-1) に、1 が -(M-2) になるように (以下同様) マップし、入力シンボルのマッピングを CPM シンボルに適用します。位相行列の列に、変調シンボルのアンラップ位相角を入力します。
for ip_sig = 0:(M^L)-1 s = int2bit(ip_sig,L,1); s = 2*s + 1 - M; x = cpm(s); pmat(:,ip_sig+1) = unwrap(angle(x(:))); end pmat = pmat/(pi*modindex); t = (0:L*sps-1)'/sps;
CPM 位相ツリーをプロットします。
plot(t,pmat); title('CPM Phase Tree') xlabel('Samples') ylabel('Phase (radians)')
詳細
参照
[1] Anderson, John B., Tor Aulin, and Carl-Erik Sundberg. Digital Phase Modulation. New York: Plenum Press, 1986.