このページの内容は最新ではありません。最新版の英語を参照するには、ここをクリックします。
comm.GMSKModulator
GMSK 法を使用した変調
説明
comm.GMSKModulatorSystem object™ は、ガウス最小偏移変調 (GMSK) 法を使用して変調します。出力は、変調信号のベースバンド表現です。詳細については、アルゴリズムを参照してください。
GMSK 法を使用して信号を変調するには、次のようにします。
comm.GMSKModulatorオブジェクトを作成し、そのプロパティを設定します。関数と同様に、引数を指定してオブジェクトを呼び出します。
System object の機能の詳細については、System object とはを参照してください。
作成
プロパティ
使用法
入力引数
出力引数
オブジェクト関数
オブジェクト関数を使用するには、System object を最初の入力引数として指定します。たとえば、obj という名前の System object のシステム リソースを解放するには、次の構文を使用します。
release(obj)
例
0 と 1 のバイナリ シーケンスを GMSK 変調器の出力にマッピングします。このマッピングは MSK 変調にも適用されます。
バイナリ入力を受け入れる GMSK 変調器を作成します。この変調器のパルス長とシンボルあたりのサンプル数の値は 1 に設定します。
gmskmodulator = comm.GMSKModulator( ... BitInput=true, ... PulseLength=1, ... SamplesPerSymbol=1);
すべて 0 の入力シーケンスを作成します。シーケンスを変調します。
x = zeros(5,1); y = gmskmodulator(x)
y = 5×1 complex
1.0000 + 0.0000i
0.0000 - 1.0000i
-1.0000 - 0.0000i
-0.0000 + 1.0000i
1.0000 + 0.0000i
各点の位相角を決定します。関数 unwrap を使用してトレンドを表示します。
theta = unwrap(angle(y))
theta = 5×1
0
-1.5708
-3.1416
-4.7124
-6.2832
0 のシーケンスにより、サンプル間で位相が -π/2 シフトします。
変調器をリセットします。すべて 1 の入力シーケンスを変調します。
reset(gmskmodulator) x = ones(5,1); y = gmskmodulator(x)
y = 5×1 complex
1.0000 + 0.0000i
0.0000 + 1.0000i
-1.0000 + 0.0000i
-0.0000 - 1.0000i
1.0000 - 0.0000i
各点の位相角を決定します。関数 unwrap を使用してトレンドを表示します。
theta = unwrap(angle(y))
theta = 5×1
0
1.5708
3.1416
4.7124
6.2832
1 のシーケンスにより、サンプル間で位相が +π/2 シフトします。
GMSK 変調器と復調器のペアを作成します。AWGN チャネル オブジェクトを作成します。
gmskmodulator = comm.GMSKModulator( ... BitInput=true, ... InitialPhaseOffset=pi/4); gmskdemodulator = comm.GMSKDemodulator( ... BitOutput=true, ... InitialPhaseOffset=pi/4); channel = comm.AWGNChannel( ... NoiseMethod='Signal to noise ratio (SNR)', ... SNR=0);
エラー レート計算機を作成し、ビタビ アルゴリズムによって発生する変調器と復調器の間の遅延を考慮します。
errorRate = comm.ErrorRate( ...
ReceiveDelay=gmskdemodulator.TracebackDepth);以下の手順を繰り返して 100 フレームのデータを処理します。
300 要素のランダムなバイナリ データのベクトルを生成します。
データを GMSK 変調します。
変調データを AWGN チャネルを介して渡します。
データを GMSK 復調します。
データのフレームについて誤り統計を収集します。
for counter = 1:100 % Transmit 100 3-bit words data = randi([0 1],300,1); modSignal = gmskmodulator(data); noisySignal = channel(modSignal); receivedData = gmskdemodulator(noisySignal); errorStats = errorRate(data, receivedData); end
誤りの統計を表示します。
fprintf('Error rate = %f\nNumber of errors = %d\n', ... errorStats(1), errorStats(2))
Error rate = 0.000133 Number of errors = 4
この例は、GMSK 変調される信号に対する帯域幅と時間 (BT) の積による効果を説明しています。
バイナリ データのベクトルを作成し、このデータに GMSK 変調を適用します。
d = [0 1 1 0 1 0 0 1 1 1]'; a = comm.GMSKModulator(BitInput=true,SamplesPerSymbol=10)
a =
comm.GMSKModulator with properties:
BitInput: true
BandwidthTimeProduct: 0.3000
PulseLength: 4
SymbolPrehistory: 1
InitialPhaseOffset: 0
SamplesPerSymbol: 10
OutputDataType: 'double'
x = a(d);
BTa = sprintf('BT=%2.1f',a.BandwidthTimeProduct);位相角をプロットし、関数 unwrap を使用してトレンドをより適切に表示します。
plot(unwrap(angle(x)),'red-'); title('Bandwidth Time Product Effect') hold on; plot(1:10:length(x),unwrap(angle(x(1:10:end))),'*'); grid on
BT 積を 1 に設定し、同じプロットで位相角をプロットします。
a = comm.GMSKModulator(BitInput=true, ...
SamplesPerSymbol=10,BandwidthTimeProduct=1)a =
comm.GMSKModulator with properties:
BitInput: true
BandwidthTimeProduct: 1
PulseLength: 4
SymbolPrehistory: 1
InitialPhaseOffset: 0
SamplesPerSymbol: 10
OutputDataType: 'double'
x = a(d); BTb = sprintf('BT=%2.1f',a.BandwidthTimeProduct); plot(unwrap(angle(x)),'blue-.'); plot(1:10:length(x),unwrap(angle(x(1:10:end))),'o');
BT 積を 0.1 に設定し、同じプロットで位相角をプロットします。
a = comm.GMSKModulator(BitInput=true, ...
SamplesPerSymbol=10,BandwidthTimeProduct=0.1)a =
comm.GMSKModulator with properties:
BitInput: true
BandwidthTimeProduct: 0.1000
PulseLength: 4
SymbolPrehistory: 1
InitialPhaseOffset: 0
SamplesPerSymbol: 10
OutputDataType: 'double'
BTc = sprintf('BT=%2.1f',a.BandwidthTimeProduct);このパルスの拡散は BT 積に逆比例し、BT が小さくなるほど、ビット シンボル周期において拡散がより大きくなります。パルスのピーク振幅は BT 積に直接比例し、ピーク振幅が小さくなるほど、ビット シンボル周期において拡散がより小さくなります。パルスの帯域幅が減少するにつれ、パルス存続時間が長くなります。
x = a(d); plot(unwrap(angle(x)),'green--'); plot(1:10:length(x),unwrap(angle(x(1:10:end))),'x'); legend(BTa,'',BTb,'',BTc,'') hold off;

パルス長の異なるガウス最小偏移変調 (GMSK) および最小偏移変調 (MSK) のアイ ダイアグラムをプロットして GMSK および MSK の変調スキームを比較します。
シンボル変数あたりのサンプルを設定します。
sps = 8;
ランダムなバイナリ データを生成します。
data = randi([0 1],1000,1);
バイナリ入力を受け入れる GMSK 変調器および MSK 変調器を作成します。GMSK 変調器の PulseLength プロパティを 1 に設定します。
gmskMod = comm.GMSKModulator( ... BitInput=true, ... PulseLength=1, ... SamplesPerSymbol=sps); mskMod = comm.MSKModulator( ... BitInput=true, ... SamplesPerSymbol=sps);
GMSK 変調器および MSK 変調器を使用してデータを変調します。
modSigGMSK = gmskMod(data); modSigMSK = mskMod(data);
SNR が 30 dB の AWGN チャネル経由で変調信号を渡します。
rxSigGMSK = awgn(modSigGMSK,30); rxSigMSK = awgn(modSigMSK,30);
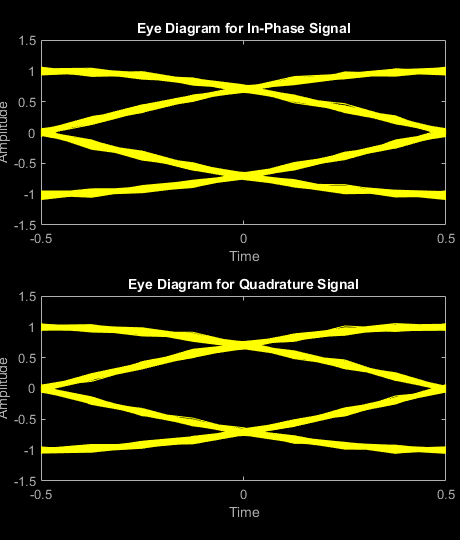
関数eyediagramを使用して、ノイズを含む信号のアイ ダイアグラムをプロットします。GMSK パルスの長さを 1 に設定すると、アイ ダイアグラムはほぼ同じになります。
eyediagram(rxSigGMSK,sps,1,sps/2)
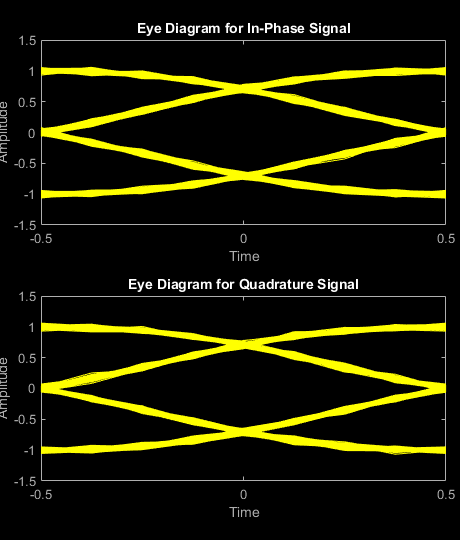
eyediagram(rxSigMSK,sps,1,sps/2)
GMSK 変調器オブジェクトの PulseLength プロパティを 3 に設定します。プロパティは調整不可能であるため、最初にオブジェクトを解放する必要があります。
release(gmskMod) gmskMod.PulseLength = 3;
更新した GMSK 変調器オブジェクトを使用して変調信号を生成し、生成した変調信号を AWGN チャネル経由で渡します。
modSigGMSK = gmskMod(data); rxSigGMSK = awgn(modSigGMSK,30);
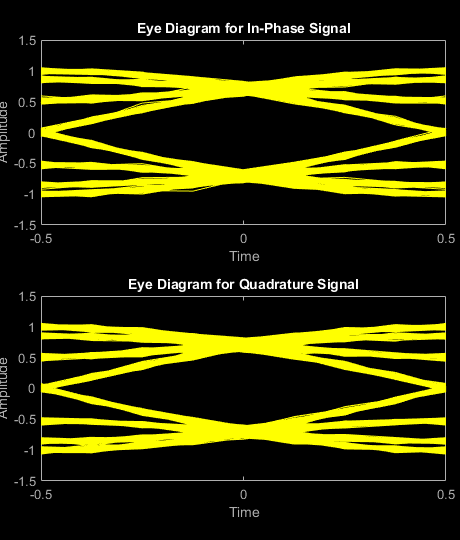
GSMK などの連続位相変調 (CPM) 波形では、波形は前のシンボルや現在のシンボルの値に依存します。パルスの長さが長くなるとアイ ダイアグラムのパスの数が増加することを確認するために、GMSK 信号のアイ ダイアログラムをプロットします。
eyediagram(rxSigGMSK,sps,1,sps/2)
GMSK 変調器オブジェクトの PulseLength パラメーターを他の値に変更して実験できます。プロパティを偶数に設定した場合、変調信号をわかりやすく表示するために gmskMod.InitialPhaseOffset を pi/4 に、関数 eyediagram のオフセット引数を sps/2 から 0 に更新する必要があります。ガウス パルス整形をよりわかりやすく表示するには、View CPM Phase Tree Using Simulinkの例で説明したように、信号の位相を表示するスコープを使用しなければなりません。
アルゴリズム
BandwidthTimeProduct プロパティは、帯域幅と時間の積を表します。このプロパティを使用すると帯域幅が狭くなりますが、符号間干渉が増加します。PulseLength プロパティは、シンボル区間でのガウス パルス整形の長さを測定します。以下の方程式によって周波数パルス整形が定義されます。Bb はパルスの帯域幅を表し、T はシンボル区間を表します。Q(t) は相補累積分布関数です。
この System object では、1 の入力シンボルによって πp/2 ラジアンの位相シフトが生じます。これは、変調指数 0.5 に相当します。
参照
[1] Anderson, John B., Tor Aulin, and Carl-Erik Sundberg. Digital Phase Modulation. New York: Plenum Press, 1986.