AUTOSAR の要素とプロパティの設定
Simulink® では、AUTOSAR ディクショナリとコード マッピング エディターを使用して、AUTOSAR ソフトウェア コンポーネントをグラフィカルに設定し、Simulink モデル要素を AUTOSAR コンポーネント要素にマッピングできます。詳細については、AUTOSAR コンポーネントの構成を参照してください。
AUTOSAR 要素を AUTOSAR のパースペクティブで設定するには AUTOSAR ディクショナリを使用します。AUTOSAR ディクショナリには、マッピングされた AUTOSAR コンポーネントとその要素、通信インターフェイス、計算方法、ソフトウェア アドレス メソッド、XML オプションがツリー形式で表示されます。ツリーを使用して AUTOSAR 要素を選択し、そのプロパティを設定します。プロパティの変更内容は、エクスポートされる ARXML 記述に反映されるほか、場合によっては生成される AUTOSAR 準拠の C コードにも反映されます。
AUTOSAR 要素の構成のワークフロー
Classic Platform の AUTOSAR コンポーネント要素を Simulink で設定するには、次の手順に従います。
AUTOSAR システム ターゲット ファイル
[autosar.tlc]が選択されているモデルを開きます。マッピングされた AUTOSAR モデルのビューを作成するか開きます。モデル ウィンドウで、次のいずれかを行います。
[アプリ] タブから、AUTOSAR コンポーネント デザイナー アプリを開きます。
右下隅にあるパースペクティブ コントロールをクリックし、[コード] を選択します。
モデルがまだ AUTOSAR ソフトウェア コンポーネントにマッピングされていない場合、AUTOSAR コンポーネントのクイック スタートが開きます。クイック スタートの手順に従い、[終了] をクリックします。詳細については、マッピングされた AUTOSAR コンポーネントのクイック スタートでの作成を参照してください。
AUTOSAR コードのパースペクティブでモデルが開きます。このパースペクティブには、モデルに加え、モデルのすぐ下にコード マッピング エディターが表示されます。
この例ではモデル例
autosar_swc_slfcnsを使用します。これは、MATLAB® コマンド ウィンドウで次のコマンドを実行して開くことができます。openExample("autosar_swc_slfcns");AUTOSAR ディクショナリを開きます。コード マッピング エディターの [AUTOSAR ディクショナリ] ボタン
 をクリックするか、または [AUTOSAR] タブで [コード インターフェイス] 、 [AUTOSAR ディクショナリ] を選択します。
をクリックするか、または [AUTOSAR] タブで [コード インターフェイス] 、 [AUTOSAR ディクショナリ] を選択します。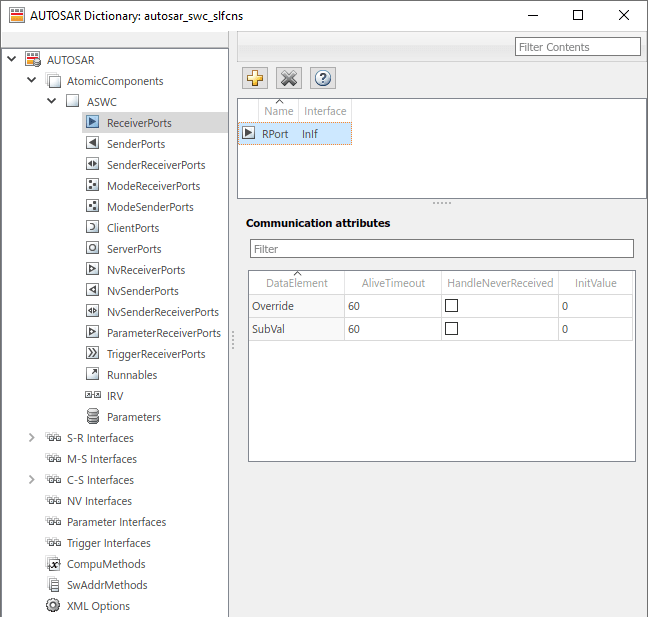
AUTOSAR の要素とプロパティを設定するには、AUTOSAR ディクショナリのツリーを使用して要素を追加または削除します。要素を選択してそのプロパティを表示および変更することもできます。[コンテンツのフィルター] フィールド (使用可能な場合) を使用して、現在のビューに一部の要素のみを表示し、その他の要素を省略します。
AUTOSAR の要素とプロパティを設定したら、コード マッピング エディターを開きます。コード マッピングのタブを使用して、Simulink 要素を新規または変更した AUTOSAR 要素にマッピングします。
[検証] ボタン
 をクリックして、AUTOSAR コンポーネントの構成を検証します。エラーが報告された場合は、対処した上で検証を再試行します。
をクリックして、AUTOSAR コンポーネントの構成を検証します。エラーが報告された場合は、対処した上で検証を再試行します。
AUTOSAR アトミック ソフトウェア コンポーネントの設定
AUTOSAR アトミック ソフトウェア コンポーネントには、ポート、ランナブル、インターランナブル変数 (IRV)、パラメーターなど、AUTOSAR 規格で定義されている AUTOSAR 要素が含まれます。AUTOSAR ディクショナリでは、コンポーネント要素がそれを所有するコンポーネントの下にツリー形式で表示されます。コンポーネント要素とそのプロパティにアクセスするには、コンポーネント名を展開します。

AUTOSAR アトミック ソフトウェア コンポーネントの要素とプロパティを設定するには次を行います。
マッピングされた AUTOSAR ソフトウェア コンポーネントが作成されているモデルを開きます。詳細については、コンポーネントの作成を参照してください。
[アプリ] タブから、AUTOSAR コンポーネント デザイナー アプリを開きます。
AUTOSAR ディクショナリを開きます。コード マッピング エディターの [AUTOSAR ディクショナリ] ボタン
をクリックするか、または [AUTOSAR] タブで [コード インターフェイス] 、 [AUTOSAR ディクショナリ] を選択します。AUTOSAR ディクショナリの左端のペインにある [AUTOSAR] の下で、[AtomicComponents] を選択します。
AUTOSAR ディクショナリのアトミック コンポーネントのビューに、アトミック コンポーネントとそのタイプが表示されます。以下を行うことができます。
AUTOSAR コンポーネントを選択してから、該当するタイプのメニュー値 (つまり、該当するアトミック ソフトウェア コンポーネント タイプ) を選択します。
Application: アプリケーション コンポーネントComplexDeviceDriver: 複雑なデバイス ドライバー コンポーネントEcuAbstraction: ECU 抽象化コンポーネントSensorActuator: センサーまたはアクチュエータ コンポーネントServiceProxy: サービス プロキシ コンポーネントAdaptiveApplication: Adaptive Platform 用に構成されたコンポーネント
名前のテキストを編集してそのコンポーネントの名前を変更します。

AUTOSAR ディクショナリの左端のペインで、[AtomicComponents] を展開し、AUTOSAR コンポーネントを選択します。この例では、モデル例
autosar_swc_slfcnsのASWCを選択します。AUTOSAR ディクショナリのコンポーネント ビューには、選択したコンポーネントの名前とタイプ、および ARXML ファイルのエクスポートのコンポーネント オプションが表示されます。以下が可能です。
コンポーネントに対して生成される [内部動作の省略名] を変更します。AUTOSAR パッケージのパスと名前を指定します。
コンポーネントに対して生成される [実装の修飾名] を変更します。AUTOSAR パッケージのパスと名前を指定します。
コンポーネントに対して生成される AUTOSAR パッケージを変更します。AUTOSAR パッケージ パスを指定するには、次のいずれかを実行できます。
これらの名前とパッケージは、
autosar.api.getAUTOSARPropertiesオブジェクトを使用してプログラムで設定できます。詳細については、AUTOSAR XML Options Settingsを参照してください。[パッケージ] パラメーター フィールドにパッケージへのパスを入力します。パッケージ パスは、
/CompanyName/Powertrainのように組織の命名パターンを使用します。[パッケージ] フィールドの右側にあるボタンをクリックし、AUTOSAR パッケージ ブラウザーを開きます。ブラウザーを使用して既存のパッケージに移動するか、新しいパッケージを作成します。ブラウザーでパッケージを選択し、[適用] をクリックすると、コンポーネントの [パッケージ] パラメーター値が選択内容によって更新されます。AUTOSAR パッケージ ブラウザーの詳細については、コンポーネント、インターフェイス、CompuMethod、または SwAddrMethod の AUTOSAR パッケージの構成を参照してください。
コンポーネントの XML オプションの詳細については、AUTOSAR パッケージの構成およびAUTOSAR XML Options Settingsを参照してください。

AUTOSAR ポートの設定
AUTOSAR ソフトウェア コンポーネントには、AUTOSAR 規格で定義されている通信ポートが含まれます。これには、送信側/受信側 (S-R)、クライアント/サーバー (C-S)、モード スイッチ (M-S)、不揮発性 (NV) データ、トリガー、パラメーターなどのインターフェイスが含まれます。AUTOSAR ディクショナリでは、通信ポートがそれを所有するコンポーネントの下に種類別にツリー形式で表示されます。ポート要素とそのプロパティにアクセスするには、コンポーネント名を展開し、ポートの種類の名前を展開します。
送信側/受信側ポート
AUTOSAR ディクショナリの送信ポートと受信ポートのビューでは、AUTOSAR 送信側/受信側 (S-R) 通信の Simulink でのモデル化をサポートしています。AUTOSAR ディクショナリを使用して、モデルに含まれる AUTOSAR の S-R ポート、S-R インターフェイス、S-R データ要素を設定できます。
AUTOSAR S-R ポート要素とそのプロパティを設定するには、マッピングされた AUTOSAR ソフトウェア コンポーネントが作成されているモデルを開き、AUTOSAR ディクショナリを開きます。
AUTOSAR ディクショナリの左端のペインで、コンポーネント名を展開し、[ReceiverPorts] を選択します。
AUTOSAR ディクショナリの受信ポートのビューに、受信ポートとそのプロパティが表示されます。次のことが可能です。
AUTOSAR 受信ポートを選択し、関連付けられている S-R インターフェイスを表示して、必要に応じて再度選択します。
名前のテキストを編集してその受信ポートの名前を変更します。
受信ポートを選択した場合、追加のポート通信仕様 (ComSpec) 属性が AUTOSAR ディクショナリに表示されます。キューに登録されていない受信ポートについて変更可能な ComSpec 属性は
AliveTimeout、HandleNeverReceived、InitValueです。キューに登録されている受信ポートについて変更可能な ComSpec 属性はQueueLengthです。詳細については、AUTOSAR 送信側/受信側ポートの通信仕様属性の設定を参照してください。受信ポートを追加するには、[追加] ボタン
 をクリックして [ポートの追加] ダイアログ ボックスを使用します。ポート名を指定し、それを既存の S-R インターフェイスに関連付けます。
をクリックして [ポートの追加] ダイアログ ボックスを使用します。ポート名を指定し、それを既存の S-R インターフェイスに関連付けます。受信ポートを削除するには、ポートを選択して [削除] ボタン
 をクリックします。
をクリックします。

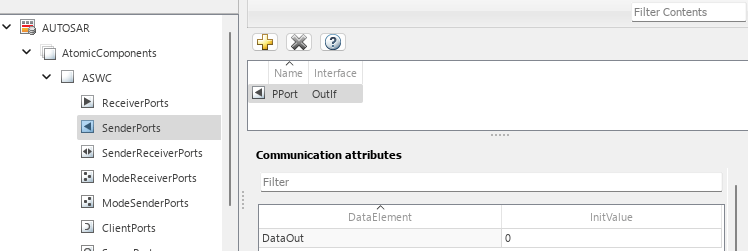
AUTOSAR ディクショナリの左端のペインで、[SenderPorts] を選択します。
AUTOSAR ディクショナリの送信ポートのビューに、送信ポートとそのプロパティが表示されます。以下を行うことができます。
AUTOSAR 送信ポートを選択し、関連付けられている S-R インターフェイスを表示して、必要に応じて再度選択します。
名前のテキストを編集してその送信ポートの名前を変更します。
送信ポートを選択した場合、ポート通信仕様 (ComSpec) 属性が AUTOSAR ディクショナリに表示されます。キューに登録されていない送信ポートについて変更可能な ComSpec 属性は
InitValueです。詳細については、AUTOSAR 送信側/受信側ポートの通信仕様属性の設定を参照してください。送信ポートを追加するには、[追加] ボタン
をクリックして [ポートの追加] ダイアログ ボックスを使用します。ポート名を指定し、それを既存の S-R インターフェイスに関連付けます。送信ポートを削除するには、ポートを選択して [削除] ボタン
をクリックします。
AUTOSAR ディクショナリの左端のペインで、[SenderReceiverPorts] を選択します。
AUTOSAR ディクショナリの送受信ポートのビューに、送受信ポートとそのプロパティが表示されます。以下を行うことができます。
AUTOSAR 送受信ポートを選択し、関連付けられている S-R インターフェイスを表示して、必要に応じて再度選択します。
名前のテキストを編集してその送受信ポートの名前を変更します。
送受信ポートを追加するには、[追加] ボタン
をクリックして [ポートの追加] ダイアログ ボックスを使用します。ポート名を指定し、それを既存の S-R インターフェイスに関連付けます。送受信ポートを削除するには、ポートを選択して [削除] ボタン
をクリックします。
メモ
AUTOSAR 送受信ポートには AUTOSAR スキーマ Version 4.1 以降が必要になります。モデルのスキーマ バージョンを選択するには、[コンフィギュレーション パラメーター] ダイアログ ボックスで [AUTOSAR コード生成オプション] (Embedded Coder) を選択します。

モード スイッチ ポート
AUTOSAR ディクショナリのモード送信ポートとモード受信ポートのビューでは、AUTOSAR モード スイッチ (M-S) 通信の Simulink でのモデル化をサポートしています。AUTOSAR ディクショナリを使用して、モデルに含まれる AUTOSAR の M-S ポートと M-S インターフェイスを設定します。詳細については、AUTOSAR モード スイッチ通信の設定を参照してください。
AUTOSAR M-S ポート要素とそのプロパティを設定するには、マッピングされた AUTOSAR ソフトウェア コンポーネントが作成されているモデルを開き、AUTOSAR ディクショナリを開きます。
AUTOSAR ディクショナリの左端のペインで、コンポーネント名を展開し、[ModeReceiverPorts] を選択します。
AUTOSAR ディクショナリのモード受信ポートのビューに、モード受信ポートとそのプロパティが表示されます。次のことが可能です。
AUTOSAR モード受信ポートを選択し、関連付けられている M-S インターフェイスを表示して、必要に応じて再度選択します。
名前のテキストを編集してそのモード受信ポートの名前を変更します。
モード受信ポートを追加するには、[追加] ボタン
をクリックして [ポートの追加] ダイアログ ボックスを使用します。ポート名を指定し、それを既存の M-S インターフェイスに関連付けます。コンポーネントに M-S インターフェイスが存在しない場合、ポートを追加する前に作成しなければなりません。モード受信ポートを削除するには、ポートを選択して [削除] ボタン
をクリックします。

AUTOSAR ディクショナリの左端のペインで、[ModeSenderPorts] を選択します。
AUTOSAR ディクショナリのモード送信ポートのビューに、モード送信ポートとそのプロパティが表示されます。次のことが可能です。
AUTOSAR モード送信ポートを選択し、関連付けられている M-S インターフェイスを表示して、必要に応じて再度選択します。
名前のテキストを編集してそのモード送信ポートの名前を変更します。
モード送信ポートを追加するには、[追加] ボタン
をクリックして [ポートの追加] ダイアログ ボックスを使用します。ポート名を指定し、それを既存の M-S インターフェイスに関連付けます。コンポーネントに M-S インターフェイスが存在しない場合、ポートを追加する前に作成しなければなりません。モード送信ポートを削除するには、ポートを選択して [削除] ボタン
をクリックします。

クライアント/サーバー ポート
AUTOSAR ディクショナリのクライアント ポートとサーバー ポートのビューでは、AUTOSAR クライアント/サーバー (C-S) 通信の Simulink でのモデル化をサポートしています。AUTOSAR ディクショナリを使用して、モデルに含まれる AUTOSAR の C-S ポート、C-S インターフェイス、C-S オペレーションを設定します。詳細については、AUTOSAR クライアント/サーバー通信の構成を参照してください。
AUTOSAR C-S ポート要素とそのプロパティを設定するには、マッピングされた AUTOSAR ソフトウェア コンポーネントが作成されているモデルを開き、AUTOSAR ディクショナリを開きます。
AUTOSAR ディクショナリの左端のペインで、コンポーネント名を展開し、[ClientPorts] を選択します。
AUTOSAR ディクショナリのクライアント ポートのビューに、クライアント ポートとそのプロパティが表示されます。次のことが可能です。
AUTOSAR クライアント ポートを選択し、関連付けられている C-S インターフェイスを表示して、必要に応じて再度選択します。
名前のテキストを編集してそのクライアント ポートの名前を変更します。
クライアント ポートを追加するには、[追加] ボタン
をクリックして [ポートの追加] ダイアログ ボックスを使用します。ポート名を指定し、それを既存の C-S インターフェイスに関連付けます。コンポーネントに C-S インターフェイスが存在しない場合、ポートを追加する前に作成しなければなりません。クライアント ポートを削除するには、ポートを選択して [削除] ボタン
をクリックします。

AUTOSAR ディクショナリの左端のペインで、[ServerPorts] を選択します。
AUTOSAR ディクショナリのサーバー ポートのビューに、サーバー ポートとそのプロパティが表示されます。次のことが可能です。
AUTOSAR サーバー ポートを選択し、関連付けられている C-S インターフェイスを表示して、必要に応じて再度選択します。
名前のテキストを編集してそのサーバー ポートの名前を変更します。
サーバー ポートを追加するには、[追加] ボタン
をクリックして [ポートの追加] ダイアログ ボックスを使用します。ポート名を指定し、それを既存の C-S インターフェイスに関連付けます。コンポーネントに C-S インターフェイスが存在しない場合、ポートを追加する前に作成しなければなりません。サーバー ポートを削除するには、ポートを選択して [削除] ボタン
をクリックします。

不揮発性データ ポート
AUTOSAR ディクショナリの不揮発性 (NV) の送信ポートと受信ポートのビューでは、AUTOSAR NV データ通信の Simulink でのモデル化をサポートしています。AUTOSAR ディクショナリを使用して、モデルに含まれる AUTOSAR の NV ポート、NV インターフェイス、NV データ要素を設定します。詳細については、AUTOSAR 不揮発性データ通信の設定を参照してください。
AUTOSAR NV ポート要素とそのプロパティを設定するには、マッピングされた AUTOSAR ソフトウェア コンポーネントが作成されているモデルを開き、AUTOSAR ディクショナリを開きます。
AUTOSAR ディクショナリの左端のペインで、コンポーネント名を展開し、[NvReceiverPorts] を選択します。
AUTOSAR ディクショナリの NV 受信ポートのビューに、NV 受信ポートとそのプロパティが表示されます。次のことが可能です。
AUTOSAR NV 受信ポートを選択し、関連付けられている NV データ インターフェイスを表示して、必要に応じて再度選択します。
名前のテキストを編集してその NV 受信ポートの名前を変更します。
NV 受信ポートを追加するには、[追加] ボタン
をクリックして [ポートの追加] ダイアログ ボックスを使用します。ポート名を指定し、それを既存の NV インターフェイスに関連付けます。NV 受信ポートを削除するには、ポートを選択して [削除] ボタン
をクリックします。

AUTOSAR ディクショナリの左端のペインで、[NvSenderPorts] を選択します。
AUTOSAR ディクショナリの NV 送信ポートのビューに、NV 送信ポートとそのプロパティが表示されます。以下を実行できます。
AUTOSAR NV 送信ポートを選択し、関連付けられている NV データ インターフェイスを表示して、必要に応じて再度選択します。
名前のテキストを編集してその NV 送信ポートの名前を変更します。
NV 送信ポートを追加するには、[追加] ボタン
をクリックして [ポートの追加] ダイアログ ボックスを使用します。ポート名を指定し、それを既存の NV インターフェイスに関連付けます。NV 送信ポートを削除するには、ポートを選択して [削除] ボタン
をクリックします。

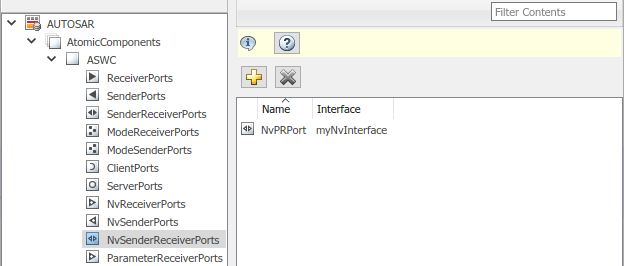
AUTOSAR ディクショナリの左端のペインで、[NvSenderReceiverPorts] を選択します。
AUTOSAR ディクショナリの NV 送受信ポートのビューに、NV 送受信ポートとそのプロパティが表示されます。以下を実行できます。
AUTOSAR NV 送受信ポートを選択し、関連付けられている NV データ インターフェイスを表示して、必要に応じて再度選択します。
名前のテキストを編集してその NV 送受信ポートの名前を変更します。
NV 送受信ポートを追加するには、[追加] ボタン
をクリックして [ポートの追加] ダイアログ ボックスを使用します。ポート名を指定し、それを既存の NV インターフェイスに関連付けます。NV 送受信ポートを削除するには、ポートを選択して [削除] ボタン
をクリックします。
メモ
AUTOSAR NV 送受信ポートには AUTOSAR スキーマ Version 4.1 以上が必要になります。モデルのスキーマ バージョンを選択するには、[コンフィギュレーション パラメーター] ダイアログ ボックスで [AUTOSAR コード生成オプション] (Embedded Coder) を選択します。
パラメーター受信ポート
AUTOSAR ディクショナリのパラメーター受信ポートのビューでは、AUTOSAR パラメーター通信の受信側の Simulink でのモデル化をサポートしています。AUTOSAR ディクショナリを使用して、モデルに含まれる AUTOSAR のパラメーター受信ポート、パラメーター インターフェイス、パラメーター データ要素を設定します。詳細については、パラメーター ソフトウェア コンポーネントと通信するための AUTOSAR ポート パラメーターの構成を参照してください。
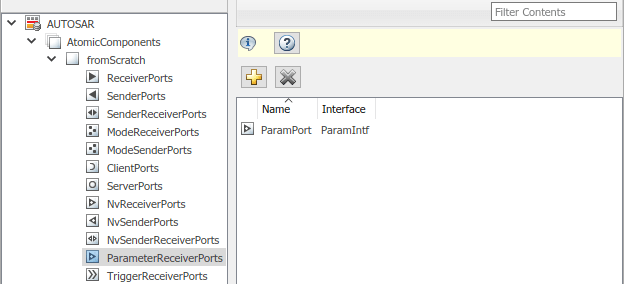
AUTOSAR パラメーター受信ポート要素とそのプロパティを設定するには、マッピングされた AUTOSAR ソフトウェア コンポーネントが作成されているモデルを開き、AUTOSAR ディクショナリを開きます。AUTOSAR ディクショナリの左端のペインで、コンポーネント名を展開し、[ParameterReceiverPorts] を選択します。
AUTOSAR ディクショナリのパラメーター受信ポートのビューに、パラメーター受信ポートとそのプロパティが表示されます。次のことが可能です。
AUTOSAR パラメーター受信ポートを選択し、関連付けられているパラメーター インターフェイスを表示して、必要に応じて再度選択します。
名前のテキストを編集してそのパラメーター受信ポートの名前を変更します。
パラメーター受信ポートを追加するには、[追加] ボタン
をクリックして [ポートの追加] ダイアログ ボックスを使用します。ポート名を指定し、それを既存のパラメーター インターフェイスに関連付けます。パラメーター受信ポートを削除するには、ポートを選択して [削除] ボタン
をクリックします。
トリガー受信ポート
AUTOSAR ディクショナリのトリガー受信ポートのビューでは、AUTOSAR トリガー通信の受信側の Simulink でのモデル化をサポートしています。AUTOSAR ディクショナリを使用して、モデルに含まれる AUTOSAR のトリガー受信ポート、トリガー インターフェイス、トリガーを設定します。詳細については、AUTOSAR 外部トリガー イベント通信の受信側の設定を参照してください。
AUTOSAR トリガー受信ポート要素とそのプロパティを設定するには、マッピングされた AUTOSAR ソフトウェア コンポーネントが作成されているモデルを開き、AUTOSAR ディクショナリを開きます。AUTOSAR ディクショナリの左端のペインで、コンポーネント名を展開し、[TriggerReceiverPorts] を選択します。
AUTOSAR ディクショナリのトリガー受信ポートのビューに、トリガー受信ポートとそのプロパティが表示されます。次のことが可能です。
AUTOSAR トリガー受信ポートを選択し、関連付けられているトリガー インターフェイスを表示して、必要に応じて再度選択します。
名前のテキストを編集してそのトリガー受信ポートの名前を変更します。
トリガー受信ポートを追加するには、[追加] ボタン
をクリックして [ポートの追加] ダイアログ ボックスを使用します。ポート名を指定し、それを既存のトリガー インターフェイスに関連付けます。トリガー受信ポートを削除するには、ポートを選択して [削除] ボタン
をクリックします。

AUTOSAR ランナブルの設定
AUTOSAR ディクショナリの [ランナブル] ビューでは、AUTOSAR コンポーネントの内部動作を実装する AUTOSAR ランナブル エンティティ (ランナブル) およびイベントの Simulink でのモデル化をサポートしています。AUTOSAR ディクショナリを使用して、AUTOSAR ランナブルとそれらを有効にする関連イベントを設定します。詳細については、AUTOSAR ランナブルとイベントの設定を参照してください。
AUTOSAR ディクショナリでは、ランナブルがそれを所有するコンポーネントの下にツリー形式で表示されます。ランナブルおよびイベントの要素とそのプロパティにアクセスするには、コンポーネント名を展開します。
AUTOSAR のランナブルおよびイベントの要素とそれらのプロパティを設定するには、マッピングされた AUTOSAR ソフトウェア コンポーネントが作成されているモデルを開き、AUTOSAR ディクショナリを開きます。AUTOSAR ディクショナリの左端のペインで、コンポーネント名を展開し、[ランナブル] を選択します。
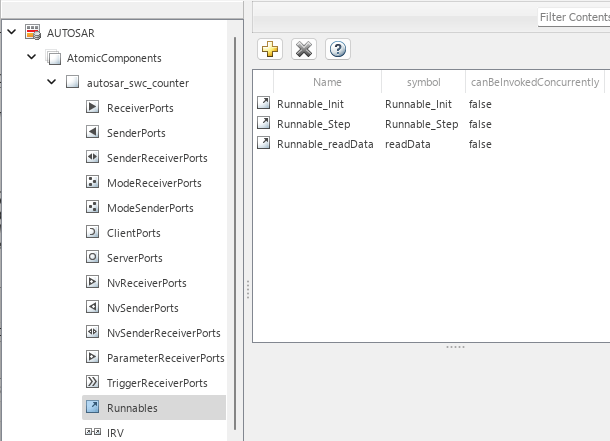
AUTOSAR ディクショナリのランナブルのビューに、AUTOSAR コンポーネントのランナブルが表示されます。次のことを実行できます。
名前のテキストを編集してその AUTOSAR ランナブルの名前を変更します。
ランナブルのシンボル名を変更します。指定された AUTOSAR ランナブルのシンボル名は、ARXML と C コードにエクスポートされます。たとえば、
Runnable1のシンボル名をRunnable1からtest_symbolに変更すると、シンボル名test_symbolはエクスポートされた ARXML と C コードに表示されます。次にエクスポートされた ARXML 記述のサンプルを示します。<RUNNABLE-ENTITY UUID="..."> <SHORT-NAME>Runnable1</SHORT-NAME> ... <SYMBOL>test_symbol</SYMBOL> ... </RUNNABLE-ENTITY>次に生成された C コードのサンプルを示します。
/* Model step function for TID1 */ void test_symbol(void) /* Explicit Task: Runnable1 */ { ... }メモ
AUTOSAR サーバーのランナブル (つまり、
OperationInvokedEventのランナブル) の場合、シンボル名は Simulink サーバー関数名と一致しなければなりません。AUTOSAR サーバーのランナブルの場合、ランナブル プロパティ
canBeInvokedConcurrentlyを設定し、同時実行の制約を適用するかどうかを指定します。非サーバーのランナブルの場合、canBeInvokedConcurrentlyをfalseに設定しておきます。詳細については、AUTOSAR サーバー ランナブルの同時実行制約を参照してください。ランナブルを追加するには、[追加] ボタン
をクリックします。ランナブルを削除するには、ランナブルを選択して [削除] ボタン
をクリックします。
ランナブルを選択し、関連付けられているイベントを表示します。[イベント] ペインには、各 AUTOSAR イベントとそのタイプ ([TimingEvent]、[DataReceivedEvent]、[ModeSwitchEvent]、[OperationInvokedEvent]、[InitEvent]、[DataReceiveErrorEvent] または [ExternalTriggerOccurredEvent]) および名前が表示されます。AUTOSAR イベント名は、その名前のテキストを編集して変更できます。[イベントの追加] と [イベント削除] ボタンを使用して、ランナブルにイベントを追加またはランナブルからイベントを削除できます。

イベントのタイプに [DataReceivedEvent] を選択すると、ランナブルは [DataReceivedEvent] によって有効化されます。[トリガー] プロパティを表示するイベント名を選択します。利用可能なトリガー ポートのリストから、イベントのトリガーを選択します

イベントのタイプに [DataReceiveErrorEvent] を選択すると、ランナブルは [DataReceiveErrorEvent] によって有効化されます。[トリガー] プロパティを表示するイベント名を選択します。利用可能なトリガー ポートのリストから、イベントのトリガーを選択します [DataReceiveErrorEvent] の使用の詳細については、DataReceiveErrorEvent のための AUTOSAR 受信ポートの設定を参照してください。

イベントのタイプに [DataSendCompletedEvent] を選択すると、ランナブルは [DataSendCompletedEvent] によって有効化されます。[トリガー] プロパティを表示するイベント名を選択します。利用可能なトリガー ポートのリストから、イベントのトリガーを選択します [DataSendCompletedEvent] の使用の詳細については、DataSendCompletedEvent 用の AUTOSAR 送信ポートの構成を参照してください。

イベントのタイプに ModeSwitchEvent を選択すると、[モードの有効化] と [モード受信ポート] プロパティが表示されます。設定されたモード受信ポートのリストから、イベントのモード受信ポートを選択します。値のリスト ([OnEntry]、[OnExit] または [OnTransition]) から、イベントのモード アクティベーション値を選択します。選択した値に基づいて、1 つまたは 2 つの [モードの宣言] ドロップダウン リストが表示されます。モード宣言グループによって宣言されたモードの中から、1 つまたは 2 つのモードをイベントに選択します。このグループには、AUTOSAR モード受信ポートをモデル化する Simulink 入力端子が関連付けられています [ModeSwitchEvent] の使用の詳細については、AUTOSAR モード スイッチ通信の設定を参照してください。

イベントのタイプに OperationInvokedEvent を選択すると、ランナブルは AUTOSAR サーバーのランナブルになります。[トリガー] プロパティを表示するイベント名を選択します。利用可能なサーバー ポートと操作の組み合わせのリストから、イベントのトリガーを選択します。[トリガー] プロパティの下に [オペレーション シグネチャ] が表示されます [OperationInvokedEvent] の使用の詳細については、AUTOSAR クライアント/サーバー通信の構成を参照してください。

イベントのタイプに [InitEvent] を選択すると、名前のテキストを編集してそのイベント名を変更できるようになります。[InitEvent] の使用の詳細については、AUTOSAR 初期化ランナブル (R4.1) の設定を参照してください。
メモ
AUTOSAR InitEvent には、AUTOSAR スキーマ Version 4.1 以上が必要になります。モデルのスキーマ バージョンを選択するには、[コンフィギュレーション パラメーター] ダイアログ ボックスで [AUTOSAR コード生成オプション] (Embedded Coder) を選択します。

イベントのタイプに [ExternalTriggerOccurredEvent] を選択すると、AUTOSAR ソフトウェア コンポーネントまたはサービスが外部トリガー イベントを通知した場合にランナブルが有効になります。[トリガー] プロパティを表示するイベント名を選択します。利用可能なトリガー受信ポートおよびトリガーの組み合わせのリストから、イベントのトリガーを選択します。[ExternalTriggerOccurredEvent] の使用の詳細については、AUTOSAR 外部トリガー イベント通信の受信側の設定を参照してください。

AUTOSAR インターランナブル変数の設定
AUTOSAR ディクショナリの [IRV] ビューでは、ランナブルを接続して AUTOSAR コンポーネントの内部動作を実装する AUTOSAR インターランナブル変数 (IRV) の Simulink でのモデル化をサポートしています。AUTOSAR ディクショナリを使用して、AUTOSAR IRV を作成し、IRV データのプロパティを設定します。詳細については、キャリブレーションおよび測定のための AUTOSAR データの設定を参照してください。
AUTOSAR ディクショナリでは、IRV がそれを所有するコンポーネントの下にツリー形式で表示されます。IRV 要素とそのプロパティにアクセスするには、コンポーネント名を展開します。
AUTOSAR IRV 要素とそのプロパティを設定するには、マッピングされた AUTOSAR ソフトウェア コンポーネントが作成されているモデルを開き、AUTOSAR ディクショナリを開きます。AUTOSAR ディクショナリの左端のペインで、コンポーネント名を展開し、[IRV] を選択します。
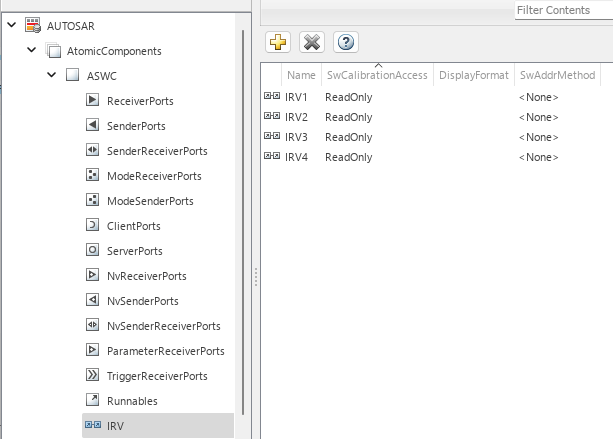
AUTOSAR ディクショナリの IRV のビューに、AUTOSAR コンポーネントの IRV が表示されます。次のことを実行できます。
名前のテキストを編集してその AUTOSAR IRV の名前を変更します。
キャリブレーション ツールおよび測定ツールの IRV データへのアクセス レベルを指定します。IRV を選択し、[SwCalibrationAccess] の値を
[ReadOnly]、[ReadWrite]または[NotAccessible]に設定します。必要に応じて、IRV データを表示するためにキャリブレーション ツールおよび測定ツールによって使用される形式を指定します。[DisplayFormat] フィールドに、ANSI® C
printf書式指定子文字列を入力します。たとえば、%2.1dは、最小幅が 2 文字、最高精度が 1 桁の符号付き 10 進数を指定しており、表示される値は12.2のようになります。書式指定子文字列の構成の詳細については、DisplayFormat の設定を参照してください。オプションで、IRV データのソフトウェア アドレス メソッドを指定します。[SwAddrMethod] を選択するか、値を入力します。AUTOSAR ソフトウェア コンポーネントは、
SwAddrMethodを使用してメモリ内のデータをグループ化し、キャリブレーション ツールおよび測定ツールからアクセスできるようにします。詳細については、AUTOSAR SwAddrMethod の設定を参照してください。IRV を追加するには、[追加] ボタン
をクリックします。IRV を削除するには、IRV を選択して [削除] ボタン
をクリックします。
AUTOSAR パラメーターの設定
AUTOSAR ディクショナリの [パラメーター] ビューでは、AUTOSAR 統合ルックアップおよび分散ルックアップに使用する AUTOSAR 内部キャリブレーション パラメーターの Simulink でのモデル化をサポートしています。AUTOSAR ディクショナリを使用して、AUTOSAR 内部パラメーターを作成し、パラメーター データのプロパティを設定します。ポートベース キャリブレーション パラメーターについてはパラメーター インターフェイスを作成します。
AUTOSAR ディクショナリでは、内部パラメーターがそれを所有するコンポーネントの下にツリー形式で表示されます。パラメーター要素とそのプロパティにアクセスするには、コンポーネント名を展開します。
AUTOSAR パラメーター要素とそのプロパティを設定するには、マッピングされた AUTOSAR ソフトウェア コンポーネントが作成されているモデルを開き、AUTOSAR ディクショナリを開きます。AUTOSAR ディクショナリの左端のペインで、コンポーネント名を展開し、[パラメーター] を選択します。
AUTOSAR ディクショナリのパラメーターのビューに、AUTOSAR コンポーネントの内部パラメーターが表示されます。次のことを実行できます。
名前のテキストを編集してその AUTOSAR パラメーターの名前を変更します。
キャリブレーション ツールおよび測定ツールのパラメーターへのアクセス レベルを指定します。パラメーターを選択し、[SwCalibrationAccess] の値を
[ReadOnly]、[ReadWrite]または[NotAccessible]に設定します。必要に応じて、パラメーター データを表示するためにキャリブレーション ツールおよび測定ツールによって使用される形式を指定します。[DisplayFormat] フィールドに、ANSI C
printf書式指定子文字列を入力します。たとえば、%2.1dは、最小幅が 2 文字、最高精度が 1 桁の符号付き 10 進数を指定しており、表示される値は12.2のようになります。書式指定子文字列の構成の詳細については、DisplayFormat の設定を参照してください。オプションで、パラメーター データのソフトウェア アドレス メソッドを指定します。[SwAddrMethod] を選択するか、値を入力します。AUTOSAR ソフトウェア コンポーネントは、
SwAddrMethodを使用してメモリ内のデータをグループ化し、キャリブレーション ツールおよび測定ツールからアクセスできるようにします。詳細については、AUTOSAR SwAddrMethod の設定を参照してください。内部パラメーターを追加するには、[追加] ボタン
をクリックします。内部パラメーターを削除するには、パラメーターを選択して [削除] ボタン
をクリックします。

AUTOSAR 通信インターフェイスの設定
AUTOSAR ソフトウェア コンポーネントでは、AUTOSAR 規格で定義されている通信インターフェイスを使用します。これには、送信側/受信側 (S-R)、クライアント/サーバー (C-S)、モード スイッチ (M-S)、不揮発性 (NV) データ、トリガー、パラメーターなどのインターフェイスが含まれます。AUTOSAR ディクショナリでは、通信インターフェイスがインターフェイスの種類の名前の下にツリー形式で表示されます。インターフェイス要素とそのプロパティにアクセスするには、インターフェイスの種類の名前を展開します。
送信側/受信側インターフェイス
AUTOSAR ディクショナリの [S-R Interfaces] ビューでは、AUTOSAR 送信側/受信側 (S-R) 通信の Simulink でのモデル化をサポートしています。AUTOSAR ディクショナリを使用して、モデルに含まれる AUTOSAR の S-R ポート、S-R インターフェイス、S-R データ要素を設定します。詳細については、AUTOSAR 送信側/受信側通信の設定およびAUTOSAR のキューに登録されている送信側/受信側通信の設定を参照してください。
AUTOSAR S-R インターフェイス要素とそのプロパティを設定するには、マッピングされた AUTOSAR ソフトウェア コンポーネントが作成されているモデルを開き、AUTOSAR ディクショナリを開きます。
AUTOSAR ディクショナリの左端のペインで、[S-R Interfaces] を選択します。
AUTOSAR ディクショナリの S-R インターフェイスのビューに、AUTOSAR 送信側/受信側インターフェイスとそのプロパティが表示されます。次のことが可能です。
S-R インターフェイスを選択してメニュー値を選択し、インターフェイスをサービスとして使用するかどうかを指定します。
名前のテキストを編集してその S-R インターフェイスの名前を変更します。
S-R インターフェイスを追加するには、[追加] ボタン
をクリックして [インターフェイスの追加] ダイアログ ボックスを使用します。インターフェイスの名前、インターフェイスに含まれるデータ要素の数、インターフェイスをサービスとして使用するかどうか、インターフェイス パッケージへのパスを指定します。S-R インターフェイスを削除するには、インターフェイスを選択して [削除] ボタン
をクリックします。

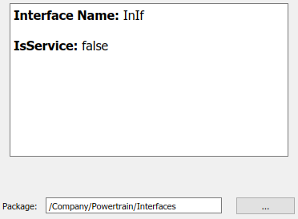
AUTOSAR ディクショナリの左端のペインで、[S-R Interfaces] を展開し、リストから S-R インターフェイスを選択します。
AUTOSAR ディクショナリの S-R インターフェイスのビューに、選択した S-R インターフェイスの名前、インターフェイスをサービスとして使用するかどうか、インターフェイス用に生成される AUTOSAR パッケージが表示されます。
インターフェイスの AUTOSAR パッケージを変更するには、次のいずれかを実行します。
[パッケージ] パラメーター フィールドにパッケージへのパスを入力します。
[パッケージ] フィールドの右側にあるボタンをクリックし、AUTOSAR パッケージ ブラウザーを開きます。ブラウザーを使用して既存のパッケージに移動するか、新しいパッケージを作成します。ブラウザーでパッケージを選択し、[適用] をクリックすると、インターフェイスの [パッケージ] パラメーター値が選択内容によって更新されます。AUTOSAR パッケージ ブラウザーの詳細については、コンポーネント、インターフェイス、CompuMethod、または SwAddrMethod の AUTOSAR パッケージの構成を参照してください。
AUTOSAR ディクショナリの左端のペインで、選択したインターフェイスを展開し、[DataElements] を選択します。
AUTOSAR ディクショナリのデータ要素のビューに、AUTOSAR 送信側/受信側インターフェイス データ要素とそのプロパティが表示されます。次のことを実行できます。
S-R インターフェイス データ要素を選択し、その名前の値を編集します。
キャリブレーション ツールおよび測定ツールの S-R インターフェイス データ要素へのアクセス レベルを指定します。データ要素を選択し、[SwCalibrationAccess] の値を
[ReadOnly]、[ReadWrite]または[NotAccessible]に設定します。必要に応じて、データ要素を表示するためにキャリブレーション ツールおよび測定ツールによって使用される形式を指定します。[DisplayFormat] フィールドに、ANSI C
printf書式指定子文字列を入力します。たとえば、%2.1dは、最小幅が 2 文字、最高精度が 1 桁の符号付き 10 進数を指定しており、表示される値は12.2のようになります。書式指定子文字列の構成の詳細については、DisplayFormat の設定を参照してください。オプションで、データ要素の説明を [LongName] フィールドで指定します。
オプションで、データ要素のソフトウェア アドレス メソッドを指定します。[SwAddrMethod] を選択するか、値を入力します。AUTOSAR ソフトウェア コンポーネントは、
SwAddrMethodを使用してメモリ内のデータをグループ化し、キャリブレーション ツールおよび測定ツールからアクセスできるようにします。詳細については、AUTOSAR SwAddrMethod の設定を参照してください。データ要素を追加するには、[追加] ボタン
をクリックします。データ要素を削除するには、データ要素を選択して [削除] ボタン
をクリックします。

モード スイッチ インターフェイス
AUTOSAR ディクショナリの [M-S Interfaces] ビューでは、AUTOSAR モード スイッチ (M-S) 通信の Simulink でのモデル化をサポートしています。AUTOSAR ディクショナリを使用して、モデルに含まれる AUTOSAR の M-S ポートと M-S インターフェイスを設定します。詳細については、AUTOSAR モード スイッチ通信の設定を参照してください。
AUTOSAR M-S インターフェイス要素とそのプロパティを設定するには、マッピングされた AUTOSAR ソフトウェア コンポーネントが作成されているモデルを開き、AUTOSAR ディクショナリを開きます。
AUTOSAR ディクショナリの左端のペインで、[M-S Interfaces] を選択します。
AUTOSAR ディクショナリの M-S インターフェイスのビューに、AUTOSAR モード スイッチ インターフェイスとそのプロパティが表示されます。次のことが可能です。
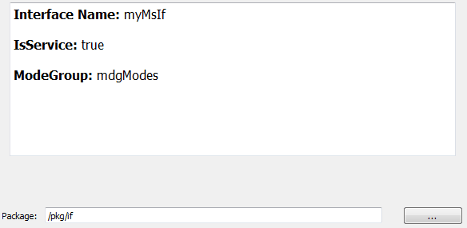
M-S インターフェイスを選択し、サービスとして使用するかどうかを指定し、関連付けられているモード グループの名前を変更します。
[IsService] プロパティの既定値は
[true]です。[true]に設定されている場合、M-S インターフェイスが実行時のモード管理に関与することを前提としています (たとえば、基本ソフトウェア モード マネージャーによって実行されるなど)。モード グループには、列挙型を使用して Simulink で宣言したモード値が含まれます。詳細については、AUTOSAR モード スイッチ通信の設定を参照してください。
名前のテキストを編集してその M-S インターフェイスの名前を変更します。
M-S インターフェイスを追加するには、[追加] ボタン
をクリックして [インターフェイスの追加] ダイアログ ボックスを使用します。インターフェイスの名前、モード グループの名前、インターフェイスをサービスとして使用するかどうか、インターフェイス パッケージへのパスを指定します。M-S インターフェイスを削除するには、インターフェイスを選択して [削除] ボタン
をクリックします。

AUTOSAR ディクショナリの左端のペインで、[M-S Interfaces] を展開し、リストから M-S インターフェイスを選択します。
AUTOSAR ディクショナリの M-S インターフェイスのビューに、選択した M-S インターフェイスの名前、インターフェイスをサービスとして使用するかどうか、関連付けられているモード グループ、インターフェイスの AUTOSAR パッケージが表示されます。
インターフェイスの AUTOSAR パッケージを変更するには、次のいずれかを実行します。
[パッケージ] パラメーター フィールドにパッケージへのパスを入力します。
[パッケージ] フィールドの右側にあるボタンをクリックし、AUTOSAR パッケージ ブラウザーを開きます。ブラウザーを使用して既存のパッケージに移動するか、新しいパッケージを作成します。ブラウザーでパッケージを選択し、[適用] をクリックすると、インターフェイスの [パッケージ] パラメーター値が選択内容によって更新されます。AUTOSAR パッケージ ブラウザーの詳細については、コンポーネント、インターフェイス、CompuMethod、または SwAddrMethod の AUTOSAR パッケージの構成を参照してください。
クライアント/サーバー インターフェイス
AUTOSAR ディクショナリの [C-S Interfaces] ビューでは、AUTOSAR クライアント/サーバー (C-S) 通信の Simulink でのモデル化をサポートしています。AUTOSAR ディクショナリを使用して、モデルに含まれる AUTOSAR の C-S ポート、C-S インターフェイス、C-S オペレーションを設定します。詳細については、AUTOSAR クライアント/サーバー通信の構成を参照してください。
AUTOSAR C-S インターフェイス要素とそのプロパティを設定するには、マッピングされた AUTOSAR ソフトウェア コンポーネントが作成されているモデルを開き、AUTOSAR ディクショナリを開きます。
AUTOSAR ディクショナリの左端のペインで、[C-S Interfaces] を選択します。
AUTOSAR ディクショナリの C-S インターフェイスのビューに、AUTOSAR クライアント/サーバー インターフェイスとそのプロパティが表示されます。次のことが可能です。
C-S インターフェイスを選択してからメニュー値を選択し、インターフェイスをサービスとして使用するかどうかを指定します。
名前のテキストを編集してその C-S インターフェイスの名前を変更します。
C-S インターフェイスを追加するには、[追加] ボタン
をクリックして [インターフェイスの追加] ダイアログ ボックスを使用します。インターフェイスの名前、インターフェイスに含まれる関連付けられるオペレーションの数、インターフェイスをサービスとして使用するかどうか、インターフェイス パッケージへのパスを指定します。C-S インターフェイスを削除するには、インターフェイスを選択して [削除] ボタン
をクリックします。

AUTOSAR ディクショナリの左端のペインで、[C-S Interfaces] を展開し、リストから C-S インターフェイスを選択します。
AUTOSAR ディクショナリの C-S インターフェイスのビューに、選択した C-S インターフェイスの名前、インターフェイスをサービスとして使用するかどうか、インターフェイスの AUTOSAR パッケージが表示されます。
インターフェイスの AUTOSAR パッケージを変更するには、次のいずれかを実行します。
[パッケージ] パラメーター フィールドにパッケージへのパスを入力します。
[パッケージ] フィールドの右側にあるボタンをクリックし、AUTOSAR パッケージ ブラウザーを開きます。ブラウザーを使用して既存のパッケージに移動するか、新しいパッケージを作成します。ブラウザーでパッケージを選択し、[適用] をクリックすると、インターフェイスの [パッケージ] パラメーター値が選択内容によって更新されます。AUTOSAR パッケージ ブラウザーの詳細については、コンポーネント、インターフェイス、CompuMethod、または SwAddrMethod の AUTOSAR パッケージの構成を参照してください。

AUTOSAR ディクショナリの左端のペインで、選択したインターフェイスを展開し、[Operations] を選択します。
AUTOSAR ディクショナリのオペレーションのビューに、AUTOSAR クライアント/サーバー インターフェイスのオペレーションが表示されます。次のことを実行できます。
C-S インターフェイスのオペレーションを選択し、その名前の値を編集します。
オペレーションを追加するには、[追加] ボタン
をクリックして [オペレーションの追加] ダイアログ ボックスを使用します。ダイアログ ボックスで、オペレーション名および関連付けられている Simulink 関数を指定します。Simulink 関数からオペレーション引数を作成するには、関連付けられている Simulink 関数をコンフィギュレーション内に存在する関数の中から選択します。引数のないオペレーションを作成する場合は、[なし]を選択します。オペレーションを削除するには、オペレーションを選択して [削除] ボタン
をクリックします。

AUTOSAR ディクショナリの左端のペインで、[Operations] を展開し、リストからオペレーションを選択します。
AUTOSAR ディクショナリのオペレーションのビューに、選択した C-S オペレーションの名前が表示されます。

AUTOSAR ディクショナリの左端のペインで、選択したオペレーションを展開し、[Arguments] を選択します。
AUTOSAR ディクショナリの引数のビューに、AUTOSAR クライアント/サーバー オペレーションの引数とそのプロパティが表示されます。次のことを実行できます。
C-S オペレーション引数を選択し、その名前の値を編集します。
C-S オペレーションの引数の方向を指定します。[Direction] の値を
[In]、[Out]、[InOut]または[Error]に設定します。オペレーションの引数がアプリケーション エラー ステータスを返す場合は、[Error]を選択します。詳細については、AUTOSAR クライアント/サーバーのエラー処理の設定を参照してください。キャリブレーション ツールおよび測定ツールの C-S オペレーション引数へのアクセス レベルを指定します。引数を選択し、[SwCalibrationAccess] の値を
[ReadOnly]、[ReadWrite]または[NotAccessible]に設定します。必要に応じて、引数を表示するためにキャリブレーション ツールおよび測定ツールによって使用される形式を指定します。[DisplayFormat] フィールドに、ANSI C
printf書式指定子文字列を入力します。たとえば、%2.1dは、最小幅が 2 文字、最高精度が 1 桁の符号付き 10 進数を指定しており、表示される値は12.2のようになります。書式指定子文字列の構成の詳細については、DisplayFormat の設定を参照してください。オプションで、引数のソフトウェア アドレス メソッドを指定します。[SwAddrMethod] を選択するか、値を入力します。AUTOSAR ソフトウェア コンポーネントは、
SwAddrMethodを使用してメモリ内のデータをグループ化し、キャリブレーション ツールおよび測定ツールからアクセスできるようにします。詳細については、AUTOSAR SwAddrMethod の設定を参照してください。引数を追加するには、[追加] ボタン
をクリックします。引数を削除するには、引数を選択して [削除] ボタン
をクリックします。

表示されたサーバー オペレーションの引数は次の Simulink Function ブロックから作成されました。

不揮発性データ インターフェイス
AUTOSAR ディクショナリの [NV Interfaces] ビューでは、AUTOSAR 不揮発性 (NV) データ通信の Simulink でのモデル化をサポートしています。AUTOSAR ディクショナリを使用して、モデルに含まれる AUTOSAR の NV ポート、NV インターフェイス、NV データ要素を設定します。詳細については、AUTOSAR 不揮発性データ通信の設定を参照してください。
AUTOSAR NV インターフェイス要素とそのプロパティを設定するには、マッピングされた AUTOSAR ソフトウェア コンポーネントが作成されているモデルを開き、AUTOSAR ディクショナリを開きます。
AUTOSAR ディクショナリの左端のペインで、[NV Interfaces] を選択します。
AUTOSAR ディクショナリの NV インターフェイスのビューに、AUTOSAR NV データ インターフェイスとそのプロパティが表示されます。次のことが可能です。
NV インターフェイスを選択してメニュー値を選択し、インターフェイスをサービスとして使用するかどうかを指定します。
名前のテキストを編集してその NV インターフェイスの名前を変更します。
NV インターフェイスを追加するには、[追加] ボタン
をクリックして [インターフェイスの追加] ダイアログ ボックスを使用します。インターフェイスの名前、インターフェイスに含まれる関連付けられるデータ要素の数、インターフェイスをサービスとして使用するかどうか、インターフェイス パッケージへのパスを指定します。NV インターフェイスを削除するには、インターフェイスを選択して [削除] ボタン
をクリックします。

AUTOSAR ディクショナリの左端のペインで、[NV Interfaces] を展開し、リストから NV インターフェイスを選択します。
AUTOSAR ディクショナリの NV インターフェイスのビューに、選択した NV データ インターフェイスの名前、インターフェイスをサービスとして使用するかどうか、インターフェイス用に生成される AUTOSAR パッケージが表示されます。
インターフェイスの AUTOSAR パッケージを変更するには、次のいずれかを実行します。
[パッケージ] パラメーター フィールドにパッケージへのパスを入力します。
[パッケージ] フィールドの右側にあるボタンをクリックし、AUTOSAR パッケージ ブラウザーを開きます。ブラウザーを使用して既存のパッケージに移動するか、新しいパッケージを作成します。ブラウザーでパッケージを選択し、[適用] をクリックすると、インターフェイスの [パッケージ] パラメーター値が選択内容によって更新されます。AUTOSAR パッケージ ブラウザーの詳細については、コンポーネント、インターフェイス、CompuMethod、または SwAddrMethod の AUTOSAR パッケージの構成を参照してください。

AUTOSAR ディクショナリの左端のペインで、選択したインターフェイスを展開し、[DataElements] を選択します。
AUTOSAR ディクショナリのデータ要素のビューに、AUTOSAR NV インターフェイス データ要素とそのプロパティが表示されます。次のことを実行できます。
NV インターフェイス データ要素を選択し、その名前の値を編集します。
キャリブレーション ツールおよび測定ツールの NV インターフェイス データ要素へのアクセス レベルを指定します。データ要素を選択し、[SwCalibrationAccess] の値を
[ReadOnly]、[ReadWrite]または[NotAccessible]に設定します。必要に応じて、データ要素を表示するためにキャリブレーション ツールおよび測定ツールによって使用される形式を指定します。[DisplayFormat] フィールドに、ANSI C
printf書式指定子文字列を入力します。たとえば、%2.1dは、最小幅が 2 文字、最高精度が 1 桁の符号付き 10 進数を指定しており、表示される値は12.2のようになります。書式指定子文字列の構成の詳細については、DisplayFormat の設定を参照してください。オプションで、データ要素のソフトウェア アドレス メソッドを指定します。[SwAddrMethod] を選択するか、値を入力します。AUTOSAR ソフトウェア コンポーネントは、
SwAddrMethodを使用してメモリ内のデータをグループ化し、キャリブレーション ツールおよび測定ツールからアクセスできるようにします。詳細については、AUTOSAR SwAddrMethod の設定を参照してください。データ要素を追加するには、[追加] ボタン
をクリックします。データ要素を削除するには、データ要素を選択して [削除] ボタン
をクリックします。

パラメーター インターフェイス
AUTOSAR ディクショナリの [パラメーター インターフェイス] ビューでは、AUTOSAR パラメーター通信の受信側の Simulink でのモデル化をサポートしています。AUTOSAR ディクショナリを使用して、モデルに含まれる AUTOSAR のパラメーター受信ポート、パラメーター インターフェイス、パラメーター データ要素を設定します。詳細については、パラメーター ソフトウェア コンポーネントと通信するための AUTOSAR ポート パラメーターの構成を参照してください。
AUTOSAR パラメーター インターフェイス要素とそのプロパティを設定するには、マッピングされた AUTOSAR ソフトウェア コンポーネントが作成されているモデルを開き、AUTOSAR ディクショナリを開きます。
AUTOSAR ディクショナリの左端のペインで、[パラメーター インターフェイス] を選択します。
AUTOSAR ディクショナリのパラメーター インターフェイスのビューに、AUTOSAR パラメーター インターフェイスとそのプロパティが表示されます。次のことが可能です。
パラメーター インターフェイスを選択してからメニュー値を選択し、インターフェイスをサービスとして使用するかどうかを指定します。
名前のテキストを編集してそのパラメーター インターフェイスの名前を変更します。
パラメーター インターフェイスを追加するには、[追加] ボタン
をクリックして [インターフェイスの追加] ダイアログ ボックスを使用します。インターフェイスの名前、インターフェイスに含まれる関連付けられるデータ要素の数、インターフェイスをサービスとして使用するかどうか、インターフェイス パッケージへのパスを指定します。パラメーター インターフェイスを削除するには、インターフェイスを選択して [削除] ボタン
をクリックします。

AUTOSAR ディクショナリの左端のペインで、[パラメーター インターフェイス] を展開し、リストからパラメーター インターフェイスを選択します。
AUTOSAR ディクショナリのパラメーター インターフェイスのビューに、選択したパラメーター インターフェイスの名前、インターフェイスをサービスとして使用するかどうか、インターフェイス用に生成される AUTOSAR パッケージが表示されます。
インターフェイスの AUTOSAR パッケージを変更するには、次のいずれかを実行します。
[パッケージ] パラメーター フィールドにパッケージへのパスを入力します。
[パッケージ] フィールドの右側にあるボタンをクリックし、AUTOSAR パッケージ ブラウザーを開きます。ブラウザーを使用して既存のパッケージに移動するか、新しいパッケージを作成します。ブラウザーでパッケージを選択し、[適用] をクリックすると、インターフェイスの [パッケージ] パラメーター値が選択内容によって更新されます。AUTOSAR パッケージ ブラウザーの詳細については、コンポーネント、インターフェイス、CompuMethod、または SwAddrMethod の AUTOSAR パッケージの構成を参照してください。

AUTOSAR ディクショナリの左端のペインで、選択したインターフェイスを展開し、[DataElements] を選択します。
AUTOSAR ディクショナリのデータ要素のビューに、AUTOSAR パラメーター インターフェイス データ要素とそのプロパティが表示されます。次のことを実行できます。
パラメーター インターフェイス データ要素を選択し、その名前の値を編集します。
キャリブレーション ツールおよび測定ツールのパラメーター インターフェイス データ要素へのアクセス レベルを指定します。データ要素を選択し、[SwCalibrationAccess] の値を
[ReadOnly]、[ReadWrite]または[NotAccessible]に設定します。必要に応じて、データ要素を表示するためにキャリブレーション ツールおよび測定ツールによって使用される形式を指定します。[DisplayFormat] フィールドに、ANSI C
printf書式指定子文字列を入力します。たとえば、%2.1dは、最小幅が 2 文字、最高精度が 1 桁の符号付き 10 進数を指定しており、表示される値は12.2のようになります。書式指定子文字列の構成の詳細については、DisplayFormat の設定を参照してください。オプションで、データ要素のソフトウェア アドレス メソッドを指定します。[SwAddrMethod] を選択するか、値を入力します。AUTOSAR ソフトウェア コンポーネントは、
SwAddrMethodを使用してメモリ内のデータをグループ化し、キャリブレーション ツールおよび測定ツールからアクセスできるようにします。詳細については、AUTOSAR SwAddrMethod の設定を参照してください。データ要素を追加するには、[追加] ボタン
をクリックします。データ要素を削除するには、データ要素を選択して [削除] ボタン
をクリックします。

トリガー インターフェイス
AUTOSAR ディクショナリの [トリガー インターフェイス] ビューでは、AUTOSAR トリガー通信の受信側の Simulink でのモデル化をサポートしています。AUTOSAR ディクショナリを使用して、モデルに含まれる AUTOSAR のトリガー受信ポート、トリガー インターフェイス、トリガーを設定します。詳細については、AUTOSAR 外部トリガー イベント通信の受信側の設定を参照してください。
AUTOSAR トリガー インターフェイス要素とそのプロパティを設定するには、マッピングされた AUTOSAR ソフトウェア コンポーネントが作成されているモデルを開き、AUTOSAR ディクショナリを開きます。
AUTOSAR ディクショナリの左端のペインで、[トリガー インターフェイス] を選択します。
AUTOSAR ディクショナリのトリガー インターフェイスのビューに、AUTOSAR トリガー インターフェイスとそのプロパティが表示されます。次のことが可能です。
トリガー インターフェイスを選択してからメニュー値を選択し、インターフェイスをサービスとして使用するかどうかを指定します。
名前のテキストを編集してそのトリガー インターフェイスの名前を変更します。
トリガー インターフェイスを追加するには、[追加] ボタン
をクリックして [インターフェイスの追加] ダイアログ ボックスを使用します。インターフェイスの名前、インターフェイスに含まれる関連付けられるトリガーの数、インターフェイスをサービスとして使用するかどうか、インターフェイス パッケージへのパスを指定します。トリガー インターフェイスを削除するには、インターフェイスを選択して [削除] ボタン
をクリックします。

AUTOSAR ディクショナリの左端のペインで、[トリガー インターフェイス] を展開し、リストからトリガー インターフェイスを選択します。
AUTOSAR ディクショナリのトリガー インターフェイスのビューに、選択したトリガー インターフェイスの名前、インターフェイスをサービスとして使用するかどうか、インターフェイス用に生成される AUTOSAR パッケージが表示されます。
インターフェイスの AUTOSAR パッケージを変更するには、次のいずれかを実行します。
[パッケージ] パラメーター フィールドにパッケージへのパスを入力します。
[パッケージ] フィールドの右側にあるボタンをクリックし、AUTOSAR パッケージ ブラウザーを開きます。ブラウザーを使用して既存のパッケージに移動するか、新しいパッケージを作成します。ブラウザーでパッケージを選択し、[適用] をクリックすると、インターフェイスの [パッケージ] パラメーター値が選択内容によって更新されます。AUTOSAR パッケージ ブラウザーの詳細については、コンポーネント、インターフェイス、CompuMethod、または SwAddrMethod の AUTOSAR パッケージの構成を参照してください。

AUTOSAR ディクショナリの左端のペインで、選択したインターフェイスを展開し、[トリガー] を選択します。
AUTOSAR ディクショナリのトリガーのビューに、AUTOSAR トリガーとそのプロパティが表示されます。次のことを実行できます。
トリガーを選択し、その名前の値を編集します。
トリガーが周期的な場合、[CseCode] および [CseCodeFactor] を使用してトリガーの周期を指定します (そうでない場合、周期を指定しません)。
周期の時間ベースを指定するには、[CseCode] メニューから値を選択します。値のスケーリング単位は ASAM コード (CSE) に基づきます。
周期のスケーリング ファクターを指定するには、[CseCodeFactor] フィールドに整数値を入力します。
たとえば、15 ミリ秒の周期を指定するには、[CseCode] を
[CSE3](1 ミリ秒) に設定し、[CseCodeFactor] を15に設定します。CseCode 時間ベース なし未指定 (トリガーは周期的ではない)
CSE01 µsec (マイクロ秒)
CSE110 µsec
CSE2100 µsec
CSE31 msec (ミリ秒)
CSE410 msec
CSE5100 msec
CSE61 秒
CSE710 秒
CSE81 分
CSE91 時間
CSE101 日
CSE201 fs (フェムト秒)
CSE2110 fs
CSE22100 fs
CSE231 ps (ピコ秒)
CSE2410 ps
CSE25100 ps
CSE261 ns (ナノ秒)
CSE2710 ns
CSE28100 ns
CSE100角度
CSE101回転 (1 = 360 度)
CSE102サイクル (1 = 720 度)
CSE997演算サイクル
CSE998フレームが使用可能な場合
CSE999新しい値がある場合常に
CSE1000非確定的 (固定したスケーリングなし)
トリガーを追加するには、[追加] ボタン
をクリックします。トリガーを削除するには、トリガーを選択して [削除] ボタン
をクリックします。

AUTOSAR 計算方法の設定
AUTOSAR ディクショナリの [CompuMethods] ビューでは、AUTOSAR データの内部値と物理表現の間の変換を指定する AUTOSAR 計算方法 (CompuMethod) の Simulink でのモデル化をサポートしています。AUTOSAR ディクショナリを使用して、AUTOSAR CompuMethod を作成および設定します。詳細については、AUTOSAR 計算方法の作成、インポート、設定を参照してください。
AUTOSAR CompuMethod 要素とそのプロパティを設定するには、マッピングされた AUTOSAR ソフトウェア コンポーネントが作成されているモデルを開き、AUTOSAR ディクショナリを開きます。[CompuMethods] を選択します。
AUTOSAR ディクショナリの [CompuMethods] ビューに、CompuMethod とそのプロパティが表示されます。次のことを実行できます。
CompuMethod を選択し、プロパティ (名前、カテゴリ、ユニット、キャリブレーションと測定の表示形式、CompuMethod 用に生成される AUTOSAR パッケージ、CompuMethod を参照する Simulink データ型のリストなど) を変更します。プロパティに関する説明は、AUTOSAR 計算方法のプロパティの設定を参照してください。
CompuMethod を追加するには、[追加] ボタン
をクリックして、以下で説明する [CompuMethod の追加] ダイアログ ボックスを使用します。CompuMethod を削除するには、CompuMethod を選択して [削除] ボタン
をクリックします。
CompuMethod の AUTOSAR パッケージを変更するには、次のいずれかを実行します。
[パッケージ] パラメーター フィールドにパッケージへのパスを入力します。
[パッケージ] フィールドの右側にあるボタンをクリックし、AUTOSAR パッケージ ブラウザーを開きます。ブラウザーを使用して既存のパッケージに移動するか、新しいパッケージを作成します。ブラウザーでパッケージを選択し、[適用] をクリックすると、CompuMethod の [パッケージ] パラメーター値が選択内容によって更新されます。AUTOSAR パッケージ ブラウザーの詳細については、コンポーネント、インターフェイス、CompuMethod、または SwAddrMethod の AUTOSAR パッケージの構成を参照してください。
CompuMethod をモデルで使用される Simulink データ型と関連付けるには、CompuMethod を選択し、[Simulink DataTypes] の右側にある [追加] ボタンをクリックします。このアクションによってダイアログ ボックスが開き、使用可能なデータ型のリストが表示されます。[Simulink DataTypes] リストにデータ型を追加するには、データ型を選択し、[OK] をクリックします。[Simulink DataTypes] リストからデータ型を削除するには、データ型を選択し、[削除] をクリックします。

[CompuMethod の追加] ダイアログ ボックスでは、CompuMethod を作成し、その初期プロパティ (名前、カテゴリ、ユニット、キャリブレーションと測定の表示形式、CompuMethod 用に生成される AUTOSAR パッケージ、CompuMethod を参照する Simulink データ型など) を指定できます。

[Simulink DataTypes] の右にある [追加] ボタンをクリックすると、Simulink データ型を AUTOSAR CompuMethod に設定するためのダイアログ ボックスが開きます。このダイアログ ボックスで、CompuMethod を参照する Simulink データ型のリストである [Simulink DataTypes] に追加する Simulink データ型を選択できます。使用可能なデータ型のリストから Simulink.NumericType または Simulink.AliasType を選択するか、Simulink 列挙型の名前を入力します。

AUTOSAR SwAddrMethod の設定
アーキテクチャ データ エディターの [SwAddrMethods] ビューは、AUTOSAR ソフトウェア アドレス メソッド (SwAddrMethod) のモデル化をサポートします。AUTOSAR ソフトウェア コンポーネントは SwAddrMethod を使用してメモリ内のデータと関数定義を、主に実行時キャリブレーション ツールによる効率性、パフォーマンス、およびデータ アクセスのためにグループ化します。アーキテクチャ データ エディターでは、AUTOSAR SwAddrMethod を表示または作成してから、SwAddrMethod を、ともにグループにするデータおよび関数に割り当てることができます。詳細については、SwAddrMethod の設定を参照してください。
AUTOSAR SwAddrMethod 要素とそのプロパティを設定するには、マッピングされた AUTOSAR ソフトウェア コンポーネントが作成されているモデルを開き、モデル ウィンドウの左下にある [インターフェイス] タブからアーキテクチャ データ エディターを開きます。[SwAddrMethods] タブを選択します。
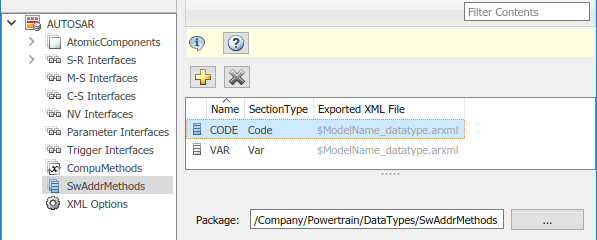
アーキテクチャ データ エディターの [SwAddrMethods] ビューには、SwAddrMethod とそのプロパティが表示されます。以下が可能です。
SwAddrMethod を選択して、SwAddrMethod の名前、セクション タイプ、生成する AUTOSAR パッケージなどのプロパティを変更する。
セクション タイプを変更するには、[SectionType] ドロップダウン リストから値を選択します。リストされている値は、AUTOSAR 規格にリストされている SwAddrMethod セクション タイプに対応しています。
SectionType 値 SwAddrMethod セクション タイプ CalibrationVariablesCALIBRATION-VARIABLES CalprmCALPRM CodeCODE ConfigDataCONFIG-DATA ConstCONST ExcludeFromFlashEXCLUDE-FROM-FLASH VarVAR SwAddrMethod を追加するには、[追加] ボタン
をクリックして [SwAddrMethod を追加します] ダイアログ ボックスを使用します。SwAddrMethod の名前、セクション タイプ、SwAddrMethod パッケージへのパスを指定します。SwAddrMethod を削除するには、SwAddrMethod を選択して [削除] ボタン
をクリックします。
SwAddrMethod の AUTOSAR パッケージを変更するには、次のいずれかを実行します。
[パッケージ] パラメーター フィールドにパッケージへのパスを入力します。
[パッケージ] フィールドの右側にあるボタンをクリックし、AUTOSAR パッケージ ブラウザーを開きます。ブラウザーを使用して既存のパッケージに移動するか、新しいパッケージを作成します。ブラウザーでパッケージを選択し、[適用] をクリックすると、SwAddrMethod の [パッケージ] パラメーター値が選択内容によって更新されます。AUTOSAR パッケージ ブラウザーの詳細については、コンポーネント、インターフェイス、CompuMethod、または SwAddrMethod の AUTOSAR パッケージの構成を参照してください。
AUTOSAR XML オプションの設定
ARXML ファイルのエクスポートに使用する AUTOSAR XML オプションを設定するには、マッピングされた AUTOSAR ソフトウェア コンポーネントが作成されているモデルを開き、AUTOSAR ディクショナリを開きます。[XML オプション] を選択します。
AUTOSAR ディクショナリの XML オプションのビューに、XML エクスポート パラメーターとその値が表示されます。以下を構成できます。
XML オプション ソース (アーキテクチャのモデル化でのコンポーネント用)
Simulink で作成された AUTOSAR 要素の XML ファイルのパッケージ化
AUTOSAR パッケージ パス
AUTOSAR プラットフォーム型の命名動作とパッケージ化
エクスポートされた AUTOSAR XML コンテンツの一部

AUTOSAR XML エクスポートの設定
この例では、AUTOSAR XML エクスポート パラメーター [エクスポートされた XML ファイルのパッケージ化] (ArxmlFilePackaging) と AUTOSAR パッケージ パスを構成します。
XML エクスポート オプションの設定
XML オプションの詳細については、AUTOSAR XML Options Settingsを参照してください。
hModel = "autosar_swc_counter";
open_system(hModel);
arProps = autosar.api.getAUTOSARProperties(hModel);エクスポートされた AUTOSAR XML ファイルのパッケージ化を単一のファイルに設定します。
get(arProps,"XmlOptions","ArxmlFilePackaging")
ans = 'Modular'
set(arProps,"XmlOptions","ArxmlFilePackaging","SingleFile"); get(arProps,"XmlOptions","ArxmlFilePackaging")
ans = 'SingleFile'
AUTOSAR パッケージ パスの設定
その他の AUTOSAR パッケージ パスのプロパティ名については、AUTOSAR パッケージとパスの構成を参照してください。
hModel = "autosar_swc_counter";
open_system(hModel);
arProps = autosar.api.getAUTOSARProperties(hModel);XML エクスポート用に AUTOSAR アプリケーション データ型パッケージのパスを指定します。
get(arProps,"XmlOptions","ApplicationDataTypePackage")
ans = '/Company/Powertrain/DataTypes/ApplDataTypes'
set(arProps,"XmlOptions","ApplicationDataTypePackage","/Company/Powertrain/DataTypes/ADTs"); get(arProps,"XmlOptions","ApplicationDataTypePackage")
ans = '/Company/Powertrain/DataTypes/ADTs'
XML オプション ソース
XML オプション ビューにパラメーター [XML オプション ソース] が表示されます。現在のコンポーネント モデルが AUTOSAR アーキテクチャ モデルに含まれている場合、このパラメーターは、モデルのビルドでどの XML オプションを使用するかを示します。[AUTOSAR アーキテクチャ モデルから継承] を指定して、共有アーキテクチャ モデルの XML オプション設定を使用します。これにより、モデルの階層構造全体にわたって一貫性が向上します。[インライン] を指定して、コンポーネント モデルのローカル XML オプション設定との共有設定をオーバーライドします。
現在のコンポーネント モデルが AUTOSAR アーキテクチャ モデルに含まれていない場合、[XML オプション ソース] パラメーターは影響しません。
あるいは、AUTOSAR 関数 set を呼び出し、XML オプション ソースをプログラムで設定できます。プロパティ XmlOptionsSource には、Inlined または Inherit のいずれかを指定します。以下に例を示します。
arProps = autosar.api.getAUTOSARProperties(hModel); set(arProps,"XmlOptions",XmlOptionsSource="Inlined");
アーキテクチャ モデルの XML オプションの詳細については、AUTOSAR Blockset アーキテクチャからのコンポジションとコンポーネントの ARXML 記述のエクスポートを参照してください。
エクスポートされた XML ファイルのパッケージ化
XML オプションのビューで、Simulink で作成された AUTOSAR 要素の XML ファイルのパッケージ化の粒度を指定できます (AUTOSAR XML ファイル構造と要素情報のラウンド トリップの保存で説明されているように、インポートされる AUTOSAR XML ファイルにはそのファイルの構造が保持されます)。次のいずれかの [エクスポートされた XML ファイルのパッケージ化] の値を選択します。
[単一のファイル]— XML を単一のファイルmodelname.arxml[モジュラー]— XML を、含まれている情報のタイプに従って名前が付けられた複数のファイルにエクスポートします。エクスポートされるファイル名 既定の内容 modelName_component.arxmlmodelName_component.arxmlには、以下を含むソフトウェア コンポーネントの記述が含まれます。端子
イベント
ランナブル
インターランナブル変数 (IRV)
インクルード データ型セット
コンポーネントスコープのパラメーターと変数
ソフトウェア コンポーネントに加え、コンポーネント ファイルには、AUTOSAR 要素カテゴリに基づいてエクスポーターがデータ型、実装、インターフェイス、またはタイミング ファイルに移動しない、パッケージ化可能な要素の記述が含まれます。
modelName_datatype.arxmlmodelName_datatype.arxmlには、以下を含むデータ型および関連付けられている要素の記述が含まれます。アプリケーション データ型および実装データ型
ソフトウェアの基本データ型
データ型のマッピング セット
定数指定
物理データの制約
システム定数
ソフトウェアのアドレス メソッド
モード宣言グループ
計算方法
単位と単位グループ
ソフトウェア レコード レイアウト
内部データ制約
modelName_implementation.arxmlmodelName_implementation.arxmlには、コード記述子を含むソフトウェア コンポーネント実装の記述が含まれます。
modelName_interface.arxmlmodelName_interface.arxmlには、送信側/受信側、クライアント/サーバー、モード スイッチ、非揮発性データ、パラメーター、およびトリガー インターフェイスを含むインターフェイスの記述が含まれます。インターフェイスには、S-R データ要素、C-S オペレーション、ポートベースのパラメーター、トリガーなどの型固有の要素が含まれます。
modelName_timing.arxmlこのファイルは複数ランナブル モデルに対してのみ生成されます。
このファイルはモデル内の実行順序の制約を定義します。
詳細については、AUTOSAR ランナブルの実行順序の設定を参照してください。
あるいは、AUTOSAR 関数 set を呼び出し、エクスポートされた XML ファイルのパッケージ化をプログラムで設定できます。プロパティ ArxmlFilePackaging には、SingleFile または Modular のいずれかを指定します。以下に例を示します。
arProps = autosar.api.getAUTOSARProperties(hModel); set(arProps,"XmlOptions",ArxmlFilePackaging="SingleFile");
詳細については、AUTOSAR の C ファイルと XML ファイルの生成を参照してください。
AUTOSAR パッケージ パス
XML オプションのビューで、AUTOSAR 要素のグループを含み、階層的な AUTOSAR パッケージ (AR-PACKAGE) 構造に配置される AR-PACKAGE を構成できます (コンポーネントの AR-PACKAGE 構造は、XML オプションの [エクスポートされた XML ファイルのパッケージ化] を使用して選択されるか、AUTOSAR XML ファイルからインポートされる ARXML ファイルの分割とは論理的に区別されます)。AUTOSAR パッケージの詳細については、AUTOSAR パッケージの構成を参照してください。
次の AUTOSAR パッケージ パスを検証して変更します。
[パッケージ パス] の見出しの下でグループ化されたもの。

[追加パッケージ] の見出しの下でグループ化されたもの。

あるいは、AUTOSAR 関数 set を呼び出し、AUTOSAR パッケージ パスをプログラムで設定できます。パッケージのプロパティ名とパッケージ パスを指定します。以下に例を示します。
arProps = autosar.api.getAUTOSARProperties(hModel); set(arProps,"XmlOptions","ApplicationDataTypePackage", ... "/Company/Powertrain/DataTypes/ApplDataTypes");
メモ
DataTypePackage のパスは、次のパッケージのパスと異なっていなければなりません。
ApplicationDataTypePackagePlatformDataTypePackageSwBaseTypePackage
AUTOSAR パッケージのプロパティ名と既定の設定の詳細については、AUTOSAR パッケージとパスの構成を参照してください。
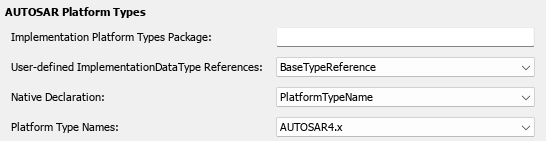
AUTOSAR プラットフォーム型
XML オプションのビューで、AUTOSAR プラットフォーム型のパッケージ化と命名動作の特性を設定できます。
次のことが可能です。
[実装プラットフォーム型パッケージ] フィールドにパッケージ名を入力して、AUTOSAR 実装プラットフォーム型と基本データ型の最上位パッケージの名前を指定します。
実装プラットフォーム型は、
ImplementationDataTypesサブパッケージとしてグループ化されます。基本データ型は、BaseTypesサブパッケージとしてグループ化されます。ModularARXML エクスポートでは、最上位パッケージとその内容がstub/ファイルにエクスポートされます。modelname_platformtypes.arxml実装データ型参照の動作を指定します。次のいずれかの [ユーザー定義実装タイプの参照] の値を選択します。
PlatformTypeReference— ユーザー定義の実装データ型は、AUTOSAR 実装データ型を参照します (ARXML でCATEGORYがTYPE_REFERENCEに設定されています)。BaseTypeReference— ユーザー定義の実装データ型は、SW 基本データ型を参照します (ARXML でCATEGORYがVALUEに設定されています)。
ネイティブ宣言が AUTOSAR プラットフォーム型名を継承するか C 整数型名を使用するかを制御します。次のいずれかの [ネイティブ宣言] の値を選択します。
PlatformTypeName— ネイティブ宣言では、AUTOSAR プラットフォーム型名を継承します。CIntegralTypeName— ネイティブ宣言では、モデル設定で指定されたハードウェア構成に従って C 整数型名を使用します。
あるいは、AUTOSAR 関数 set を呼び出し、AUTOSAR プラットフォーム型の XML オプションをプログラムで設定できます。プロパティ名と値を指定します。有効なプロパティ名は、PlatformDataTypePackage、UsePlatformTypeReferences、および NativeDeclaration です。以下に例を示します。
arProps = autosar.api.getAUTOSARProperties(hModel); set(arProps,"XmlOptions",PlatformDataTypePackage="/AUTOSAR_PlatformTypes"); set(arProps,"XmlOptions",UsePlatformTypeReferences="PlatformTypeReference"); set(arProps,"XmlOptions",NativeDeclaration="PlatformTypeName");
追加 XML オプション
XML オプションのビューの [追加オプション] で、エクスポートされた AUTOSAR XML コンテンツの一部を設定できます。

次のことが可能です。
必要に応じて、AUTOSAR アプリケーションのデータ型を ARXML コード内に生成する既定の動作をオーバーライドします。各 AUTOSAR データ型にアプリケーションのデータ型の生成を適用するには、[ImplementationDataType Reference] の値を
[許可]から[NotAllowed]に変更します。詳細については、アプリケーション データ型の生成の制御を参照してください。生成された AUTOSAR 測定変数の [SwCalibrationAccess] プロパティの既定値、キャリブレーション パラメーター、信号およびパラメーター データ オブジェクトを制御します。次のいずれかの [SwCalibrationAccess DefaultValue] の値を選択します。
ReadOnly— 読み取りアクセスのみ。ReadWrite(既定) — 読み取りおよび書き込みアクセス。NotAccessible— キャリブレーション ツールと測定ツールではアクセスできません。
詳細については、SwCalibrationAccess の設定を参照してください。
線形関数 CompuMethod の CompuMethod 変換の方向を制御します。次のいずれかの [CompuMethod 方向] の値を選択します。
InternalToPhys(既定値) — 内部値から物理表現へ変換するためにCompuMethodセクションを生成します。PhysToInternal— 物理値から内部表現へ変換するためにCompuMethodセクションを生成します。Bidirectional— 内部から物理へ、物理から内部への双方向に変換するためにCompuMethodセクションを生成します。
詳細については、線形関数に対する CompuMethod の方向の設定を参照してください。
必要に応じて、ARXML コード内の AUTOSAR の実装データ型に関する内部データ制約情報を生成する既定の動作をオーバーライドします。実装データ型に関する内部データ制約のエクスポートを強制するには、[内部 DataConstraints のエクスポート] オプションを選択します。詳細については、AUTOSAR 内部データ制約のエクスポートの設定を参照してください。
必要に応じて、ルックアップ テーブルの定数の設定をエクスポートする既定の動作をオーバーライドします。ルックアップ テーブルの定数の設定は既定ではエクスポートされます。[ルックアップ テーブルのアプリケーション値指定をエクスポート] オプションを選択して、このエクスポートを無効または有効にすることができます。
必要に応じて、プロキシと AUTOSAR データ型を除く変動点のバインド タイムをオーバーライドして設定できます。次のいずれかの [VariationPoint Binding Time] の値を選択します。
PreCompileTime— 変動点のバインド タイムをコンパイル時より前に設定します。CodeGenerationTime— 変動点のバインド タイムをコード生成時になるように設定します。
変動点プロキシのバインド タイムを設定するには、サポートされるバリアント ブロックで [バリアントのアクティベーションのタイミング] プロパティを使用します。
あるいは、AUTOSAR 関数 set を呼び出し、追加の XML オプションをプログラムで設定できます。プロパティ名と値を指定します。有効なプロパティ名は、ImplementationTypeReference、SwCalibrationAccessDefault、CompuMethodDirection、InternalDataConstraintExport、ExportLookupTableApplicationValueSpecification、および VpBindingTimeOverride です。以下に例を示します。
arProps = autosar.api.getAUTOSARProperties(hModel); set(arProps,"XmlOptions",ImplementationTypeReference="NotAllowed"); set(arProps,"XmlOptions",SwCalibrationAccessDefault="ReadOnly"); set(arProps,"XmlOptions",CompuMethodDirection="PhysToInternal"); set(arProps,"XmlOptions",InternalDataConstraintExport=true); set(arProps,"XmlOptions",ExportLookupTableApplicationValueSpecification=true); set(arProps,"XmlOptions",VpBindingTimeOverride="PreCompileTime");