Introduction to Quaternions for Aerospace Applications
Quaternions provide a compact, efficient, and numerically stable method for representing 3D rotations. Unlike Euler angles, quaternions avoid gimbal lock and are more computationally efficient than rotation matrices. This efficiency makes Quaternions ideal for aerospace applications such as spacecraft attitude control, aircraft orientation, and sensor fusion.
Quaternion Basics
A quaternion is a four-element vector used to encode 3D orientation. A quaternion consists of a scalar part and a vector part, defined as q = w + xi+yj+zk.
Scalar part: w represents the rotation magnitude.
Vector part: v = xi+yj+zk represents the rotation axis.
You use these components to encode a rotation in 3D space. The quaternion must be a unit quaternion, which means it has a norm of 1, to represent a valid rotation.
Representation Formats
Quaternions can be represented in two common formats:
Scalar-first: q = [w, x, y, z]
Scalar-last: q = [x, y, z, w]
Note
The Aerospace Toolbox uses scalar-first quaternions (q = [w, x, y, z]) to represent right-handed passive transformations.
Mathematical Representation of Quaternions
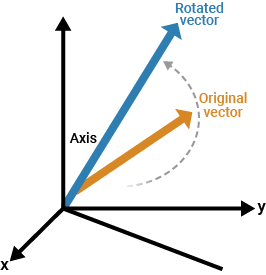
A quaternion vector represents a rotation about a unit vector through the angle θ. A unit quaternion itself has unit magnitude, and can be written in this vector format:
An alternative representation of a quaternion is as a complex number, ,
where, for the purposes of multiplication:
This representation simplifies how the quaternion product describes transformations from successive rotations.
Advantages of Using Quaternions in Aerospace Applications
Quaternions provide several advantages over traditional rotation methods:
Avoid gimbal lock: Euler angles can fail when two rotation axes align, a situation known as gimbal lock.
Improve computational efficiency: Quaternions require fewer operations than rotation matrices, which provides efficiency when modeling real-time systems.
Reduce memory usage: You only need four values to represent a quaternion, compared to nine for a rotation matrix.
Enable smooth interpolation: Use spherical linear interpolation (SLERP) to smoothly transition between orientations.
Maintain numerical stability: Quaternions are less prone to rounding errors than traditional rotation methods during repeated transformations.
Coordinate System Considerations
When you apply quaternions, you must understand the coordinate system in use. The behavior of the rotation depends on whether you are working in a body-fixed or inertial frame:
In a body-fixed frame, you apply the rotation relative to the moving object. This frame is common in onboard navigation systems.
In an inertial frame, you apply the rotation relative to a fixed global reference, such as Earth-centered inertial coordinates.
You also need to consider the handedness of the coordinate system.
| Coordinate System | Axes Orientation | Positive Rotation |
|---|---|---|
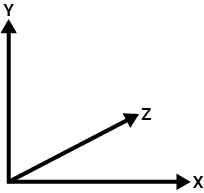
Right-Handed
| +x: right, +y: up, +z: forward | Counterclockwise |
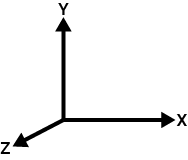
Left-Handed
| +x: right, +y: up, +z: backward | Clockwise |
Types of Quaternion Transformations
Quaternions can represent two fundamental types of rotational transformations: active and passive. The Aerospace Toolbox uses passive rotations.
Active Rotation
The object moves while the coordinate system remains fixed.
The point P rotates to P′ clockwise about a fixed axis.
Active rotation is common in robotics applications.
Passive Rotation

The coordinate system rotates while the object remains fixed.
The frame rotates counterclockwise, changing the coordinates of P.
Passive rotation is common in aerospace applications.
This table provides a comparison of the two rotation types.
| Feature | Active Rotation | Passive Rotation |
|---|---|---|
What moves | Point or object | Coordinate system |
Rotation direction | Clockwise | Counterclockwise |
Common in these applications | Robotics | Aerospace |
| Quaternion application | Directly rotates vector | Transforms frame orientation |
How Quaternions Differ from Euler Angles and Rotation Matrices
This table describes the key characteristics of rotational methods offered in the Aerospace Toolbox.
| Method | How You Use It | Flexibility | Performance | Reliability | Intuition & Visualization |
|---|---|---|---|---|---|
Euler angles | Rotate step by step along axes | Constrained by axis sequence | Fast for basic use cases | Susceptible to gimbal lock | Easy to grasp, but can cause misinterpretation |
Rotation matrices | Apply a full 3-by-3 matrix transform | Broad range but structurally rigid | Slower, heavier calculations | Sensitive to floating-point drift | Intuitive in linear algebra |
Quaternions | Operate as a single rotation entity | Seamless transitions across all axes | Efficient and scalable | Consistently stable, even in 3D | Less visual, but highly precise |
See Also
angle2quat | quatlog | dcm2quat | quaternion | quat2angle | quat2dcm | quat2rod | quatconj | quatdivide | quatexp | quatinterp | quatinv | quatmod | quatmultiply