evaluateDetectionPrecision
(削除予定) オブジェクト検出の適合率メトリクスの評価
evaluateDetectionPrecision は将来のリリースで削除される予定です。代わりに、evaluateObjectDetection を使用してください。より新しい evaluateObjectDetection は、オブジェクト検出器のパフォーマンスの包括的な解析を実行するために使用できます。
構文
説明
averagePrecision = evaluateDetectionPrecision(detectionResults,groundTruthData)groundTruthData と比較した detectionResults の平均適合率を返します。平均適合率を使用して、オブジェクト検出器のパフォーマンスを測定できます。マルチクラス検出器の場合、関数は averagePrecision を groundTruthData で指定された順序で各オブジェクト クラスのスコアのベクトルとして返します。
[ は、前の構文の入力引数を使用して、適合率/再現率曲線をプロットするデータ点を返します。averagePrecision,recall,precision] = evaluateDetectionPrecision(___)
[___] = evaluateDetectionPrecision(___, は、検出をグラウンド トゥルース ボックスに割り当てるためのオーバーラップしきい値を指定します。threshold)
入力引数
オブジェクトの位置とスコア。検出された各オブジェクトの境界ボックスとスコアを含む 2 列の table として指定します。マルチクラス検出の場合、3 番目の列には各検出の予測ラベルが含まれます。境界ボックスは M 行 4 列の cell 配列に保存しなければなりません。スコアは M 行 1 列の cell 配列に保存し、ラベルは categorical ベクトルとして保存しなければなりません。
オブジェクトを検出するときに、imageDatastore を使用して検出結果の table を作成できます。
ds = imageDatastore(stopSigns.imageFilename);
detectionResults = detect(detector,ds);データ型: table
ラベル付きのグラウンド トゥルース。データストアまたは table として指定します。
各境界ボックスは [x,y,width,height] の形式でなければなりません。
データストア — 関数
readおよび関数readallが、境界ボックスとラベルの cell ベクトルの列を 2 つ以上もつ cell 配列または table を返すデータストア。境界ボックスは、[x,y,width,height] 形式の M 行 4 列の行列の cell 配列内になければなりません。データストアの関数readおよび関数readallは、次のいずれかの形式を返さなければなりません。{boxes,labels} —
boxLabelDatastoreはこのタイプのデータストアを作成します。{images,boxes,labels} — 統合されたデータストア。たとえば、
combine(imds,blds) を使用しています。
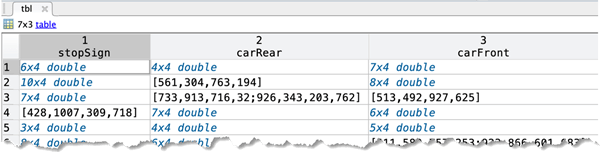
boxLabelDatastoreを参照してください。table — 1 つ以上の列。すべての列に境界ボックスが含まれています。各列は、stopSign、carRear、carFront などの単一のオブジェクト クラスを表す M 行 4 列の行列を含む cell ベクトルでなければなりません。これらの列には、[x,y,width,height] 形式の、M 個の境界ボックスの 4 要素 double 配列が含まれます。この形式は、対応するイメージでの境界ボックスの左上隅の位置とサイズを指定します。
グラウンド トゥルース ボックスに割り当てられた検出のオーバーラップしきい値。数値スカラーとして指定します。オーバーラップ率は、Intersection over Union として計算されます。