モバイル ロボットの要件の整理とリンク
System Composer™ を使用したモデルベース システムズ エンジニアリング (MBSE) 設計における最初のステップは、要件を設定することです。この機能には Requirements Toolbox™ のライセンスが必要です。
要件は、システムの目的の動作と特性を表すステートメントの集合です。要件はシステム設計の整合性を確保するものであり、実現と検証が可能で、明確かつ相互に一貫性があります。設計のレベルごとに適切な要件が必要です。このモバイル ロボットの例には、3 つの要件セットがあります。
利害関係者のニーズ — 一連のエンドユーザーのニーズ。利害関係者は、モバイル ロボットの航続時間、ペイロード、速度、自律性、信頼性に関連する属性に関心があります。
システム要件 — システムレベルの設計と密接に関連する一連の要件。システム要件には、システムが利害関係者のニーズにどのように対応するかを表す派生した要件が含まれます。
実装要件 — モデル内のサブシステムを指定する一連の要件。実装要件には、個々のサブシステムのバッテリー、構造、推進力、経路生成、位置、コントローラー、コンポーネントの寿命に関する仕様が含まれます。
ある要件セットを別の要件セットにリンクすることで、上位レベルの各要件を実装までトレースできます。MBSE 設計の進化に伴い、反復要件解析を使用して要件のトレーサビリティとカバレッジを強化できます。トレーサビリティ ダイアグラムを使用して要件のトレーサビリティを可視化できます。トレーサビリティ ダイアグラムを使用したリンクの可視化 (Requirements Toolbox)を参照してください。
メモ
この例では、Simscape™ ブロックを使用します。Simscape ライセンスがない場合でも、モデルを開くことができますが、ブロック パラメーターの変更などの基本的な変更しか行えません。
システム要件への利害関係者の要件のリンク
モバイル ロボットの例には、利害関係者のニーズ、システム要件、実装要件を満たす機能アーキテクチャ、論理アーキテクチャ、物理アーキテクチャが含まれています。
1.プロジェクトを起動します。
openProject("scMobileRobotExample");2.次のシステムをメモリに読み込み、それらの要件リンクを表示します。
論理アーキテクチャ モデル
systemcomposer.loadModel("scMobileRobotLogicalArchitecture");物理アーキテクチャ モデル
systemcomposer.loadModel("scMobileRobotHardwareArchitecture");3.次の要件セットをメモリに読み込みます。
利害関係者のニーズ
slreq.load("scMobileRobotStakeholderNeeds");システム要件
slreq.load("scMobileRobotRequirements");実装要件
slreq.load("scMobileRobotSubsystemRequirements");4.要件エディター (Requirements Toolbox)を開きます。
slreq.editor
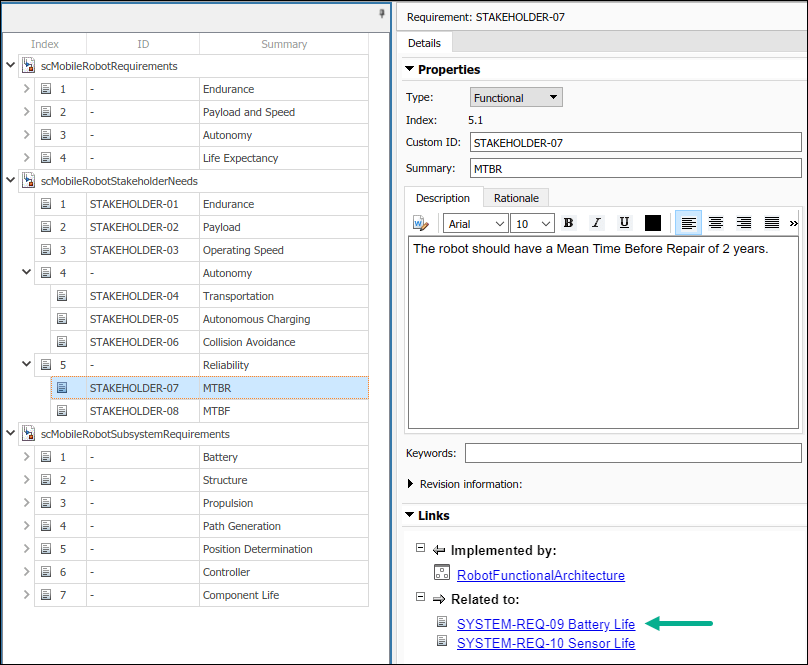
利害関係者のニーズを派生した要件にリンクして、上位レベルの目標を追跡できます。平均修理間隔 (MTBR) の要件 STAKEHOLDER-07 がバッテリー寿命の要件 SYSTEM-REQ-09 によって調整されます。
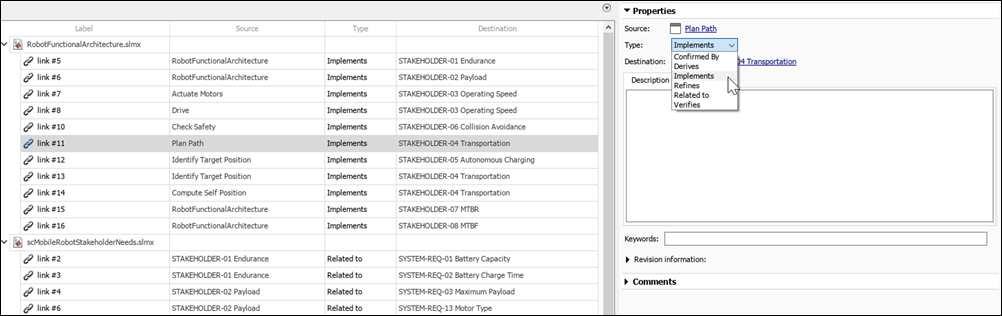
特定のリンク タイプを設定できます。リンク タイプを変更するには、要件エディター (Requirements Toolbox)で [リンクの表示] を選択します。詳細については、リンクの作成と保存 (Requirements Toolbox)を参照してください。
要件の操作に戻るには、要件エディター (Requirements Toolbox)で [要件の表示] を選択します。利害関係者のニーズである搬送要件 STAKEHOLDER-04 は位置推定のシステム要件 SYSTEM-REQ-05 によって実装されます。ロボットは、その現在の位置を指定された許容誤差で特定できる必要があります。SYSTEM-REQ-05 を右クリックして [Select for Linking with Requirement] を選択します。次に、STAKEHOLDER-04 を右クリックして [Create a link from SYSTEM-REQ-05 to STAKEHOLDER-04] を選択します。
参照
[1] Rahman, Mohd Azizi Abdul, Katsuhiro Mayama, Takahiro Takasu, Akira Yasuda, and Makoto Mizukawa. “Model-Driven Development of Intelligent Mobile Robot Using Systems Modeling Language (SysML).” In Mobile Robots: Control Architectures, Bio-Interfacing, Navigation, Multi Robot Motion Planning and Operator Training, edited by Janusz Będkowski. InTech Open, 2011. https://doi.org/10.5772/26906.
参考
アプリ
関数
slreq.editor(Requirements Toolbox) |slreq.load(Requirements Toolbox) |systemcomposer.loadModel