File Solid
CAD ファイルから導出された特性をもつ固体

ライブラリ:
Simscape /
Multibody /
Body Elements
説明
File Solid ブロックは、CAD ファイルからジオメトリ、慣性、色、および基準フレームを使用して固体をモデル化したものです。このブロックは、「サポートされているソフトウェアとファイル形式」セクションにリストされた各種の CAD フォーマットをサポートしています。
サポートされているソフトウェアとファイル形式
| CAD | サポートされているリリース |
|---|---|
| ACIS | 2020 まで |
| Autodesk® Inventor | 2022 まで |
| CATIA V4 | 4.2.5 まで |
| CATIA V5 | V5-6 R2021 まで |
| CATIA V6 | V5-6 R2019(R29) まで |
| Creo-Pro/E | Pro/Engineer 19.0 ~ Creo 8.0 |
| IGES | 5.1、5.2、5.3 |
| JT | v10.5 まで |
| NX | V11.0 ~ NX 18.0、NX ~ NX12、NX 1847 Series ~ NX 1980 Series |
| OBJ | すべてのバージョン |
| Parasolid | v33 まで |
| PRC | すべてのバージョン |
| Rhino3D | 4 ~ 7 |
| Solid Edge | V19 ~ 20、ST ~ ST10、2021 |
| SolidWorks® | 97 ~ 2021 |
| STEP | AP 203 E1/E2、AP 214、AP 242 |
| STL | すべてのバージョン |
| U3D | ECMA-363 |
メモ
CAD 図面には固体についての必要なデータが含まれていないため、CAD 図面をブロックで読み取ることはできません。
パーツのインポート
File Solid ブロックは、インポートされたパーツを剛体として表します。このブロックでは、CAD ファイルから慣性と色のデータを読み取ることができます。また、インポートされたパーツに対して、それらの特性を明示的に指定することもできます。詳細については、慣性およびグラフィックスを参照してください。
既定では、このブロックには、固体の位置と向きを定義する 1 つの基準フレームだけが含まれています。ボディに追加のフレームを作成するには、[Frames] セクションで [Create] ボタン  を選択します。
を選択します。
既定では、インポートされたボディには、インポートされたボディの位置と向きを定義する 1 つの基準フレームだけが含まれています。この基準フレームの位置と向きは、元の CAD ファイルのモデルの原点と整合します。
ボディの別のパーツに接続が必要な場合やボディに複数の接続が必要な場合は、ボディに追加のフレームを作成できます。フレームごとに、新しいフレーム端子がブロックに追加されます。ボディに追加のフレームを作成するには、[Frames] セクションで [Create] ボタン を選択します。
アセンブリのインポート
File Solid ブロックは、CAD ファイルで指定されている既定の姿勢を使用して、インポートされたアセンブリを単一の剛体として表します。ブロックは CAD ファイルの拘束をすべて無視し、アセンブリ全体で単一の密度をもつものと仮定します。
[Inertia] で [Type] を [Calculate From Geometry] と指定し、[Based On] を [Density From File] と指定すると、密度のデータを File Solid ブロックで CAD ファイルから読み取ることができます。密度をブロックで正しく読み取るためには、CAD ファイルにアセンブリ全体の密度がなければならず、すべてのパーツの密度が同じ値であるか未指定であるかのどちらかでなければなりません。それ以外の場合、シミュレーションでエラーが返されます。
インポートされたアセンブリの密度、質量、慣性の各特性は手動で指定できます。処理は単一のパーツの場合と同じです。
小平面、多角形、BRep のモデルなど、さまざまなモデル化方法で表されたパーツをもつアセンブリをインポートできます。ただし、点、エッジ、面などの必要な境界プリミティブがあるのは BRep モデルだけであるため、フレームは BRep モデルで表されたパーツでのみ作成できます。
慣性特性の計算
固体の慣性特性を計算するには、[Inertia]、[Type] パラメーターを [Calculate from Geometry] に設定します。この設定により、プロパティ インスペクターのツールストリップに [Inertia] ボタンが表示されます。慣性特性を計算するには [Inertia] ボタンをクリックします。計算された値が可視化ペインに表示されます。
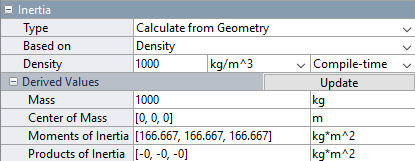
このブロックでは、固体の基準フレームで重心を定義し、分解の慣性フレームで慣性モーメントと慣性乗積を指定しています。この慣性フレームは、座標軸が基準フレームと一致し、原点の位置は固体の重心になります。慣性の指定の詳細については、カスタム慣性の指定を参照してください。
固体の可視化
プロパティ インスペクターには、固体の視覚的なフィードバックを即座に提供する可視化ペインがあります。このペインを使用して、固体の形状や色を確認して調整します。さまざまな角度から固体を検証するには、標準ビューを選択するか、ビュー選択キューブまたは方向トライアドを操作するか、表示の回転、パン、ズームを使います。
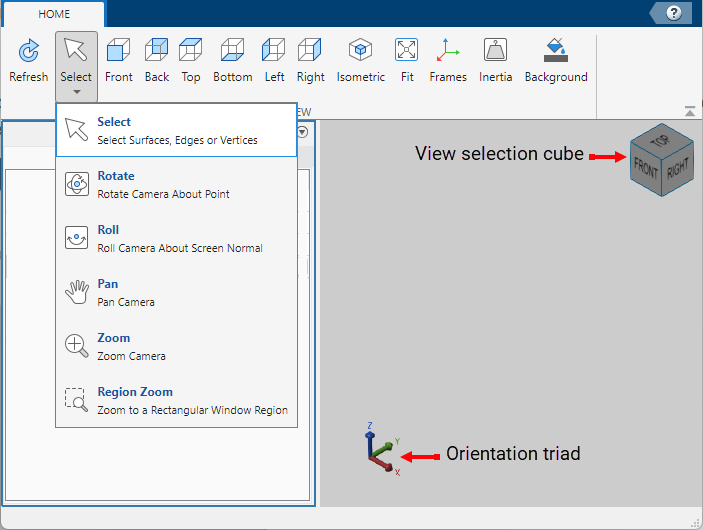
固体のジオメトリに対する最新の変更を可視化ペインに表示するには、ツールストリップの [Refresh] をクリックします。ツールストリップの [Frames] と [Background] をクリックして、固体のフレームを表示したり、可視化ペインの背景色を変更したりすることもできます。
ジオメトリのエクスポート
File Solid ブロックは、インポートされた CAD ファイルの Simscape Multibody 環境における凸包表現を生成できます。凹の特徴をもつ固体の場合、生成されるジオメトリは、固体を完全に囲む最小の凸包になります。この凸包は実際のジオメトリの近似として機能し、空間的な接触のモデル化に使用できます。次の図は、ボディとその凸包表現を示しています。

固体の実際のジオメトリに基づいて、質量や慣性などの物理特性がブロックで計算されます。
例
直交座標 3 次元プリンター
この例では、直交座標 3 次元プリンターをモデル化します。このモデルでは、各軸のモーターの回転運動を指定して印刷パスを定義することができます。この例では、事前定義された回転運動を使用して、印刷ヘッドが 2 つの文字 S と M のエッジに沿って動きます。

トロリーとホイストをもつタワー クレーン
この例では、トロリーとホイストをもつタワー クレーンをモデル化します。ホイストは荷重を上げ下げすることができ、トロリーはタワー方向とその逆方向に荷重を移動させます。荷重の持ち上げとトロリーの移動の制御に使用するプーリのモデル化には、Belts and Cables ライブラリのブロックが使用されています。
制限
Mac では、生成されたジオメトリに三角形や頂点が多数含まれていると、可視化ペインの実行が遅くなります。この問題を軽減するには、頂点の数の少ない CAD ファイルを使用します。
端子
フレーム
ジオメトリ
パラメーター
ジオメトリ
CAD ファイルの名前または CAD ファイルのパス。文字ベクトルとして指定します。ファイル名またはパスにファイル拡張子が含まれない場合、ブロックはファイル タイプを STEP と想定します。ブロックはさまざまなフォーマットの CAD ファイルをサポートしています。サポートされている CAD ファイルのフォーマットのリストについては、サポートされているソフトウェアとファイル形式を参照してください。
CAD ファイルの場所に応じて、これらのメソッドのいずれかを使用して、[ファイル名] を指定します。
| 場所 | メソッド |
|---|---|
| ファイルが、現在の作業フォルダーまたは MATLAB® パスにある | テキスト ボックスにファイル名を入力します。 例: |
| ファイルが存在するフォルダーが、現在のフォルダーではなく、MATLAB パス上のフォルダーでもない |
|

ヒント
複数のプラットフォームでブロックを使用する場合、または他のユーザーとモデルを共有する場合は、ファイル名または相対パスの使用を検討してください。
スラッシュ (/) はどのプラットフォームでも有効な区切り記号です。バックスラッシュ (\) は Microsoft Windows プラットフォームでのみ有効です。
固体ジオメトリ単位のソース。インポート ファイルで指定されている単位を使用する場合は、[From File] を選択します。独自の単位を指定する場合は、[Custom] を選択します。
ジオメトリ ファイルで定義されているジオメトリを解釈する際の長さの単位。単位を変更すると、インポートされるジオメトリのスケールが変更されます。
依存関係
このパラメーターを有効にするには、[Unit Type] を [Custom] に設定します。
実際のジオメトリの凸包表現を生成するには、[Export] で [Convex Hull] を選択します。このパラメーターを選択すると、端子 CH が有効になります。
慣性
使用する慣性パラメーター表現。回転慣性は無視できるものとして集中質量をモデル化するには、[Point Mass] を選択します。慣性モーメントと慣性乗積を指定して分布質量をモデル化するには、[Custom] を選択します。既定の設定の [Calculate from Geometry] では、回転慣性の特性を固体のジオメトリと指定した質量または質量密度からブロックで自動的に計算できます。
慣性の計算で使用するパラメーター。ブロックは、固体のジオメトリと選択されたパラメーターから慣性テンソルを計算します。
Density from File: CAD ファイルから取得した密度に基づいてボディの慣性を計算します。密度のデータを含むのは一部の CAD フォーマットだけであることに注意してください。Custom Density: ダイアログ ボックスで指定された密度に基づいてボディの慣性を計算します。Custom Mass: ダイアログ ボックスで指定された質量に基づいてボディの慣性を計算します。
依存関係
このパラメーターを有効にするには、[Type] を [Calculate from Geometry] に設定します。
材料の単位体積あたりの質量。密度の単位のスカラーで、正と負の値をとります。固体ボディの中空の影響をモデル化するには、負の質量密度を指定します。
依存関係
このパラメーターを有効にするには、次のように設定します。
[Type] を
[Calculate from Geometry][Based on] を
[Custom Density]
固体要素による総質量。このパラメーターは正と負をとります。複合ボディ (複数の固体と慣性で構成されるボディ) の中空の影響を取得するには、負の値を使用します。ボディの質量が全体で正になるように注意してください。
依存関係
このパラメーターを有効にするには、[Type] を [Custom] または [Point Mass] に設定します。あるいは、[Type] を [Calculate from Geometry] に設定し、[Based on] を [Custom Mass] に設定します。
グラフィックス
固体の視覚的表現のタイプ。[From Geometry]、[Marker]、または [None] として指定します。固体の視覚的表現を表示するには、パラメーターを [From Geometry] に設定します。固体をマーカーとして表現するには、パラメーターを [Marker] に設定します。モデルの可視化で固体を非表示にするには、パラメーターを [None] に設定します。
視覚特性を指定するパラメーター表現。
Simple: [Diffuse Color] や [Opacity] など、基本的な視覚特性を定義するには、このオプションを選択します。Advanced: [Specular Color]、[Ambient Color]、[Emissive Color]、[Shininess] など、他の視覚特性を指定するには、このオプションを選択します。From File: インポート ファイルから色のデータを使用するには、このオプションを選択します。色のデータは、Pro/E、STEP、SLDPRTなどの特定のファイル形式でのみサポートされています。色のデータをサポートしない形式では、パーツは既定で黒になります。
依存関係
このパラメーターを有効にするには、[Type] を [From Geometry] または [Marker] に設定します。
固体の可視化に使用するマーカーの形状。マーカーの動きは固体そのものの動きを反映します。
依存関係
このパラメーターを有効にするには、[Type] を [Marker] に設定します。
マーカーの幅 (ピクセル)。この幅はズーム レベルでスケーリングされません。マーカーの表示サイズは画面の解像度に部分的に依存することに注意してください。解像度が高いほど、単位長さあたりのピクセル数が多くなり、それによってアイコンが小さくなります。
依存関係
このパラメーターを有効にするには、[Type] を [Marker] に設定します。
直接白色光の下でのグラフィックスの色。0 ~ 1 のスケールの [R G B] または [R G B A] ベクトルとして指定します。オプションの 4 番目の要素 (A) は色の不透明度を 0 ~ 1 のスケールで指定します。不透明度の要素を省略した場合、値 1 を指定したのと同じになります。
依存関係
このパラメーターを有効にするには、[Type] を [From Geometry] または [Marker] に設定します。
拡散反射による光の色。0 ~ 1 の範囲の値をもつ [R,G,B] または [R,G,B,A] ベクトルとして指定します。ベクトルは行ベクトルまたは列ベクトルを使用できます。オプションの 4 番目の要素は色の不透明度を指定します。不透明度の要素を省略した場合、値 1 を指定したのと同じになります。
拡散色は、描画固体の主な色を反射して陰影を付け、描画オブジェクトに立体感を与えます。
依存関係
このパラメーターを有効にするには、次のように設定します。
[Type] を
[From Geometry]または[Marker]にします。[Visual Properties] を
[Advanced]にします。
鏡面反射による光の色。0 ~ 1 の範囲の値をもつ [R,G,B] または [R,G,B,A] ベクトルとして指定します。ベクトルは行ベクトルまたは列ベクトルを使用できます。オプションの 4 番目の要素は色の不透明度を指定します。不透明度の要素を省略した場合、値 1 を指定したのと同じになります。このパラメーターは、反射ハイライト (光源からの光の反射によって描画固体上に生じる明るいスポット) の色を変更します。
依存関係
このパラメーターを有効にするには、次のように設定します。
[Type] を
[From Geometry]または[Marker]にします。[Visual Properties] を
[Advanced]にします。
自己発光による色。0 ~ 1 の範囲の [R,G,B] または [R,G,B,A] ベクトルとして指定します。ベクトルは行ベクトルまたは列ベクトルを使用できます。オプションの 4 番目の要素は色の不透明度を指定します。不透明度の要素を省略した場合、値 1 を指定したのと同じになります。
発光色は、外部のソースからの色ではない、固体自体から放たれているように見える色です。固体に放射色があれば、外部の光源がなくても固体を認識できます。
依存関係
このパラメーターを有効にするには、次のように設定します。
[Type] を
[From Geometry]または[Marker]にします。[Visual Properties] を
[Advanced]にします。
フレーム
選択すると端子 R が表示されます。
[Create] ボタン をクリックすると、ボディに付加される新しいフレームを作成するためのペインが開きます。このペインで、フレームの名前、原点、および向きを指定できます。
カスタム フレームに名前を付けるには、[Frame Name] パラメーターのテキスト フィールドをクリックします。名前によって、固体ブロックおよび Multibody Explorer の [Model Tree] ペインで対応する端子が識別されます。
カスタム フレームの [Frame Origin] を選択するには、次のいずれかの方法を使用します。
At Reference Frame Origin: 新しいフレームの原点を固体の基準フレームの原点と一致させます。
At Center of Mass: 新しいフレームの原点を固体の重心と一致させます。
Based on Geometric Feature: 新しいフレームの原点を選択した特徴の中心と一致させます。有効な特徴には、表面、ライン、点があります。可視化ペインから特徴を選択し、[Use Selected Feature] をクリックして原点の位置を確定します。このオプションの下のフィールドに、原点の位置の名前が表示されます。
カスタム フレームの向きを定義するには、[Frame Axes] セクションでカスタム フレームの [Primary Axis] および [Secondary Axis] を選択し、それらの向きを指定します。
次の方法を使用して、主軸と副軸の向きを指定するベクトルを選択します。主軸は、選択したベクトルと平行になり、残る 2 つの座標軸を主軸の法平面に制約します。副軸は、選択したベクトルを法平面上に投影したものと平行になります。
Along Reference Frame Axis: 固体の基準フレームの軸が選択されます。
Along Principal Inertia Axis: 固体の主慣性軸の座標軸が選択されます。
Based on Geometric Feature: 固体の選択したジオメトリの特徴に関連付けられたベクトルが選択されます。有効な特徴には、表面とラインがあります。対応するベクトルは、可視化ペインで白の矢印で示されます。可視化ペインから特徴を選択し、[Use Selected Feature] をクリックして選択を確定できます。このオプションの下のフィールドに、選択した特徴の名前が表示されます。
作成済みのフレーム。N は、それぞれのカスタム フレームを一意に識別する番号です。
既存のカスタム フレームの名前を編集するには、テキスト フィールドをクリックします。
カスタム フレームのその他の項目 (原点や座標軸など) を編集するには、編集ボタン
 をクリックします。
をクリックします。カスタム フレームを削除するには、削除ボタン
 をクリックします。
をクリックします。
依存関係
このパラメーターを有効にするには、[New Frame] をクリックしてフレームを作成します。