Push Button ブロックを使用した信号のマージの制御
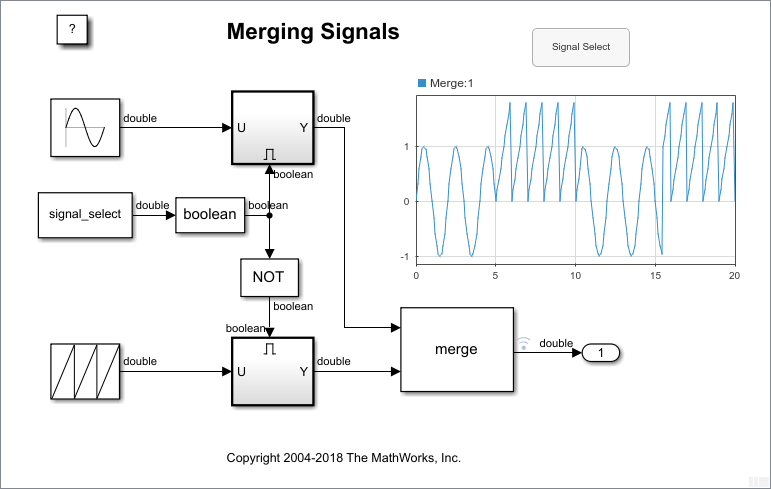
このモデル例は信号のマージの例を変更したものです。mergedemo モデルは、Simulink® でソース ブロックと Triggered Subsystem を使用して 2 つの異なる信号をマージする方法を示したものです。mergedemo モデルでは、Merge ブロックへの入力を提供する Triggered Subsystem を矩形波でイネーブルおよびディセーブルにします。このモデルでは、Signal Select Push Button ブロックを使用して Triggered Subsystem のイネーブル信号を制御できます。
モデルの変更
このモデルを mergedemo の例から作成するには次を行います。
1. Triggered Subsystem を制御する Discrete Pulse Generator ブロックと Scope ブロックを削除します。
2. Push Button ブロック、Outport ブロック、Constant ブロック、および Dashboard Scope ブロックを追加します。
3. Outport ブロックを Merge ブロックの出力に接続します。
4. Merge ブロックの出力信号を Dashboard Scope で表示します。
5. Constant ブロックを Data Type Conversion ブロックの入力に接続し、その値として変数名を指定します。このモデルで使用する変数名は signal_select です。[Unrecognized functions or variables] エラーをクリックし、モデル ワークスペースで変数を作成します。
変数 signal_select で Triggered Subsystem が制御されるようになります。
6. Ctrl+D を押してブロック線図を更新します。作成した変数を接続に使用できるようになります。
7. Push Button ブロックを変数 signal_select に接続します。
この例では、Push Button ブロックの [オンの値] は 0 に設定されています。Push Button ブロックを押すと、signal_select の値が 0 に変わり、ノコギリ波に接続された Triggered Subsystem がイネーブルになります。Push Button ブロックを押したときに正弦波に接続された Triggered Subsystem をイネーブルにする場合は、Push Button ブロックの [オンの値] を 1 に設定します。
対話型シミュレーション
このモデルでは、シミュレーション中にモデルを操作できるように、シミュレーションのペーシングを使用してモデルの実行速度を低速にします。シミュレーションのペーシングの詳細については、シミュレーション ペーシング オプションを参照してください。
シミュレーションを実行します。モデルのシミュレーション中に、Signal Selection Push Button ブロックを押したままにします。Push Button ブロックを押したときの効果を Dashboard Scope ブロックで観察できます。