upfirdn
アップサンプリング、FIR フィルターの適用、ダウンサンプリング
説明
例
R2026a 以降
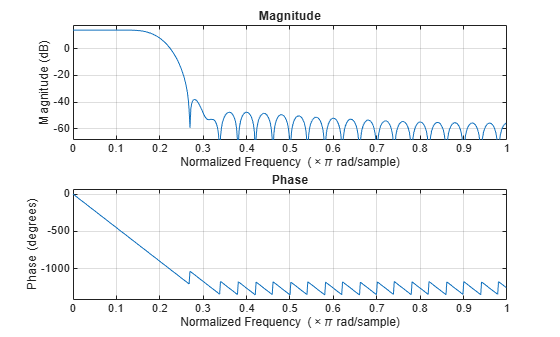
アップサンプリングによるイメージング アーチファクトを抑制するために、50 次の FIR ローパス フィルターを設計します。アップサンプリング係数は 5 です。フィルターの群遅延とインパルス応答を計算します。
p = 5; n = 50; h = p*fir1(n,1/p); dl = grpdelay(h,1,1); freqz(h)
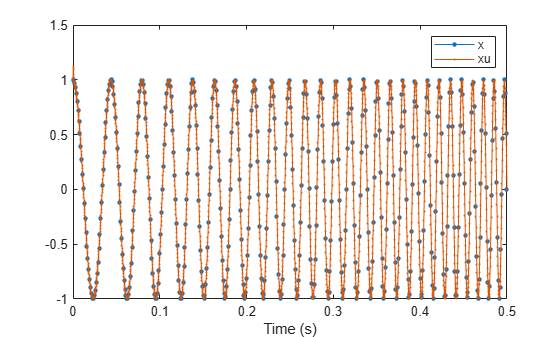
サンプル レート 30 Hz で 1 秒間の線形スイープ余弦波 (チャープ) 信号を定義します。
Fs = 1e3; t = single(0:1/Fs:1)'; x = chirp(t,20,t(end),150);
チャープ信号をフィルター処理し、アップサンプリングします。入力信号が単精度であるため、出力も単精度です。
xu = upfirdn(x,h,p);
入力信号と出力信号を比較します。フィルターによって生じた遅延を補正します。対応するリサンプリングした時間ベクトルを生成します。
xu = xu(dl+1:end); tu = single(0:(length(xu)-1))/(Fs*p); plot(t,x,".-",MarkerSize=10) hold on plot(tu,xu,".-",MarkerSize=4) hold off xlim([0 0.5]) xlabel("Time (s)") legend(["x" "xu"])
有理因数変換による信号のサンプル レートを 48 kHz の DAT レートから 44.1 kHz の CD サンプル レートに変更します。rat関数を使用して、有理因数の分子係数 L と分母係数 M を求めます。
Fdat = 48e3; Fcd = 44.1e3; [p,q] = rat(Fcd/Fdat)
p = 147
q = 160
で 0.25 秒間サンプリングされた 1.5 kHz の正弦波を生成します。信号の最初のミリ秒をプロットします。
t = 0:1/Fdat:0.25-1/Fdat; x = sin(2*pi*1.5e3*t); stem(t,x) xlim([0 0.001]) xlabel("Time (s)") hold on

カイザー ウィンドウを使用してアンチエイリアシングのローパス フィルターを設計します。フィルター バンド エッジをカットオフ周波数 の 90% と 110% として設定します。5 dB の通過帯域リップルと 40 dB の阻止帯域の減衰量を指定します。通過帯域のゲインを L に設定します。
f = (Fdat/2)*min(1/p,1/q); d = designfilt("lowpassfir", ... PassbandFrequency=0.9*f,StopbandFrequency=1.1*f, ... PassbandRipple=5,StopbandAttenuation=40, ... DesignMethod="kaiserwin",SampleRate=48e3); h = p*tf(d);
フィルター h で upfirdn を使用して正弦波をリサンプリングします。フィルターによって生じた遅延を計算および補正します。対応するリサンプリングした時間ベクトルを生成します。
y = upfirdn(x,h,p,q); delay = floor(((filtord(d)-1)/2-(p-1))/p); y = y(delay+1:end); t_res = (0:(length(y)-1))/Fcd;
プロット上のリサンプリングした信号を重ね合わせます。
stem(t_res,y,"*") legend("Original","Resampled",Location="southeast") hold off

入力引数
出力引数
ヒント
xとhが共にベクトル入力はフィルターと信号が 1 つずつのため、関数で
xとhの畳み込みが行われます。出力信号yは、xが行ベクトルの場合は行ベクトル、その他の場合yは列ベクトルとなります。xが行列、hがベクトル入力は 1 つのフィルターと複数の信号のため、関数では
hとxの各列との畳み込みが行われます。結果として得られるyは、xと同数の列をもつ行列となります。xがベクトルで、hが行列入力は複数のフィルターと 1 つの信号のため、関数では
hの各列とxの畳み込みが行われます。結果として得られるyは、hと同数の列をもつ行列となります。xとhが、同じ列数をもつ行列入力はフィルターと信号が共に複数のため、関数では
xとhの対応する列の畳み込みが行われます。結果として得られるyは、xおよびhと同数の列をもつ行列となります。
アルゴリズム
upfirdn では、ポリフェーズ内挿構造が使用されます。ポリフェーズ構造での乗算-加算演算の回数は、約 (LhLx – pLx)/q となります。ここで、Lh と Lx は、それぞれ h(n) と x(n) の長さです。長い信号に対しては、この公式がだいたいの場合正確となります。
upfirdn では、以下の 3 つの操作が連続して実行されます。
通常、FIR フィルターはローパス フィルターであり、これは firpm や fir1 などの別の関数を使用して設計しなければなりません。
参照
[1] Crochiere, R. E. "A General Program to Perform Sampling Rate Conversion of Data by Rational Ratios." Programs for Digital Signal Processing (Digital Signal Processing Committee of the IEEE Acoustics, Speech, and Signal Processing Society, eds.). New York: IEEE Press, 1979, Programs 8.2-1–8.2-7.
[2] Crochiere, R. E., and Lawrence R. Rabiner. Multirate Digital Signal Processing. Englewood Cliffs, NJ: Prentice-Hall, 1983.