phasedelay
デジタル フィルターの位相遅延
構文
説明
phasedelay(___) を使用すると、位相遅延応答と周波数が対比のためにプロットされます。
例
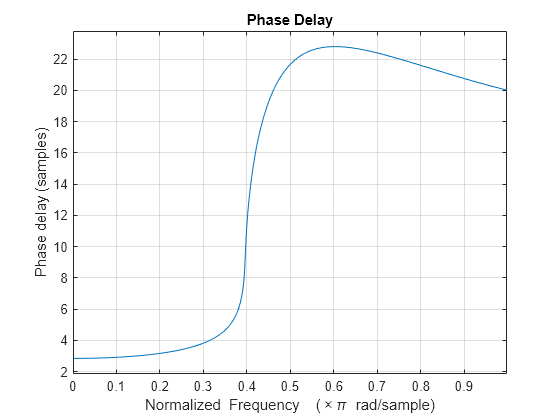
制約付き最小二乗を使用して、正規化されたカットオフ周波数 0.3 をもつ次数 54 のローパス FIR フィルターを設計します。通過帯域リップルに 0.02 線形単位、阻止帯域の減衰量に 0.08 線形単位を指定します。フィルターの位相遅延応答を計算してプロットします。
Ap = 0.02; As = 0.008; b = fircls1(54,0.3,Ap,As); phasedelay(b)

この例を、designfilt を使用して再実行します。この関数ではリップルが dB 単位で表されることに注意してください。
Apd = 40*log10((1+Ap)/(1-Ap)); Asd = -20*log10(As); d = designfilt('lowpassfir','FilterOrder',54,'CutoffFrequency',0.3, ... 'PassbandRipple',Apd,'StopbandAttenuation',Asd); phasedelay(d)

R2024b 以降
阻止帯域エッジ周波数が 0.4、阻止帯域の減衰量が 50 dB の 40 次ローパス チェビシェフ II 型デジタル フィルターを設計します。CTF 形式の係数を使用して、フィルターの位相遅延応答をプロットします。
[B,A] = cheby2(40,50,0.4,"ctf"); phasedelay(B,A,"ctf")
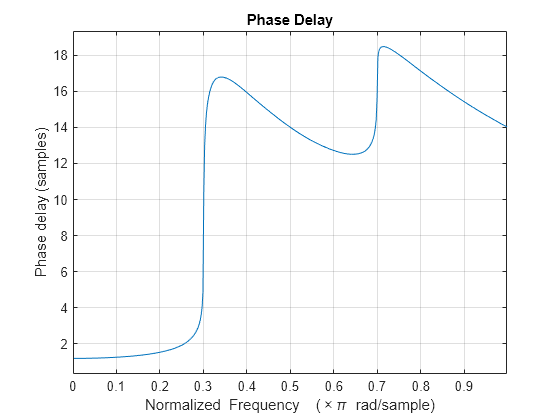
通過帯域エッジ周波数が 0.3 と 0.7、通過帯域リップルが 0.1 dB、阻止帯域の減衰量が 50 dB の 30 次バンドパス楕円デジタル フィルターを設計します。CTF 形式の係数とゲインを使用して、フィルターの位相遅延応答をプロットします。
[B,A,g] = ellip(30,0.1,50,[0.3 0.7],"ctf"); phasedelay({B,A,g},"ctf")
200 Hz のカットオフ周波数で 3 次ローパス バタワース フィルターを設計します。サンプル レートは 1000 Hz です。
fc = 200;
fs = 1000;
[z,p,k] = butter(3,fc/(fs/2),'low');関数 zp2sos を使用して、零点、極およびゲインを 2 次セクションに変換します。フィルターの位相遅延応答を計算し、評価点の数を 1024 に設定します。結果を表示します。
sos = zp2sos(z,p,k); phasedelay(sos,1024)

正規化された通過帯域周波数 0.4 をもつ次数 10 の楕円フィルターを設計します。0.5 dB の通過帯域リップルと 20 dB の阻止帯域の減衰量を指定します。単位円全体にわたるフィルターの位相遅延応答を表示します。
[b,a] = ellip(10,0.5,20,0.4);
phasedelay(b,a,512,'whole')
この例を、designfilt を使用して再実行します。
d = designfilt('lowpassiir','DesignMethod','ellip','FilterOrder',10, ... 'PassbandFrequency',0.4, ... 'PassbandRipple',0.5,'StopbandAttenuation',20); phasedelay(d,512,'whole')

入力引数
出力引数
詳細
ヒント
スケーリング ゲインを含むフィルターを CTF 形式で取得できます。butter、cheby1、cheby2、ellip などのデジタル IIR フィルター設計関数の出力を使用します。これらの関数で、"ctf" フィルタータイプ引数を指定し、スケール値を取得するために B、A、g を返すように指定します。 (R2024b 以降)
アルゴリズム
フィルターの "位相遅延応答" は、入力信号がシステムを通過する際に各周波数成分に生じる時間遅延に対応します。関数 phasedelay では、入力 b および a の分子係数と分母係数を指定した場合、フィルターの位相遅延応答と周波数ベクトルが返されます。
参照
[1] Lyons, Richard G. Understanding Digital Signal Processing. Upper Saddle River, NJ: Prentice Hall, 2004.