Polynomial Trajectory
ウェイポイントを通る多項式軌跡の生成
ライブラリ:
Robotics System Toolbox /
Utilities
説明
Polynomial Trajectory ブロックは、3 次多項式、5 次多項式、または B スプライン多項式のいずれかを使用して、与えられた時間点にウェイポイントを通過する軌跡を生成します。このブロックは、[時間] の入力に基づいて、この軌跡を通る位置、速度、および加速度を出力します。B スプライン多項式のウェイポイントは、実際には B スプラインの凸包の制御点を定義し、実際のウェイポイントではありませんが、最初と最後のウェイポイントには一致します。
初期値と最終値は、[時間点] で定義される時間範囲外で一定に保たれます。
例
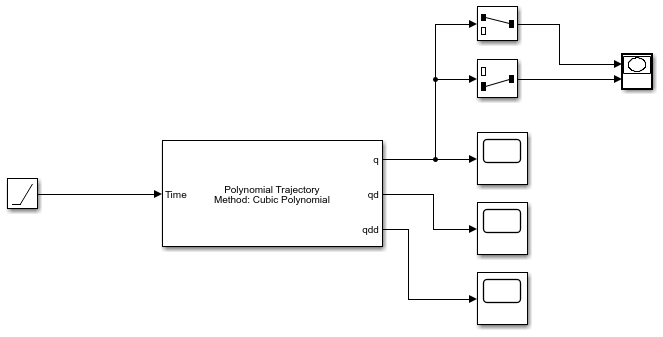
3 次多項式の軌跡の生成
Simulink® で Polynomial Trajectory ブロックを使用して 3 次多項式の軌跡を生成する。

B スプライン軌跡の生成
Simulink で Polynomial Trajectory ブロックを使用して B スプライン軌跡を生成する。
端子
入力
出力
パラメーター
ヒント
パフォーマンスを高めるには、次のオプションを検討してください。
ウェイポイントまたはパラメーターの変更の数を最小限にする。
[ウェイポイント ソース] パラメーターを
Internalに設定する。[シミュレーション実行方法] パラメーターを
[コード生成]に設定する。詳細については、インタープリター型実行とコード生成 (Simulink)を参照してください。
参照
[1] Farin, Gerald E. Curves and Surfaces for Computer Aided Geometric Design: A Practical Guide. San Diego, CA: Academic Press, 1993.
拡張機能
バージョン履歴
R2019a で導入