Trapezoidal Velocity Profile Trajectory
台形速度プロファイルを使用して複数のウェイポイントを通る軌跡を生成
ライブラリ:
Robotics System Toolbox /
Utilities
説明
Trapezoidal Velocity Profile Trajectory ブロックは、台形速度プロファイルに従う一連の与えられたウェイポイントを通る軌跡を生成します。このブロックは、与えられたウェイポイントと速度プロファイルのパラメーターに基づいて、軌跡の位置、速度、および加速度を出力します。
例
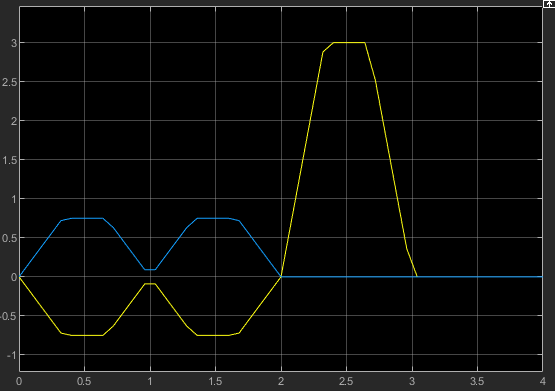
台形速度軌跡の生成
Simulink® で Trapezoidal Velocity ブロックを使用して台形速度軌跡を生成する。
端子
入力
出力
パラメーター
ヒント
パフォーマンスを高めるには、次のオプションを検討してください。
ウェイポイントまたはパラメーターの変更の数を最小限にする。
[ウェイポイント ソース] パラメーターを
Internalに設定する。[シミュレーション実行方法] パラメーターを
[コード生成]に設定する。詳細については、インタープリター型実行とコード生成 (Simulink)を参照してください。
参照
[1] Lynch, Kevin M., and Frank C. Park. Modern Robotics: Mechanics, Planning and Control. Cambridge: Cambridge University Press, 2017.
[2] Spong, Mark W., Seth Hutchinson, and M. Vidyasagar. Robot Modeling and Control. John Wiley & Sons, 2006.
拡張機能
バージョン履歴
R2019a で導入