transformtraj
2 つの変換の間の軌跡を生成
構文
説明
例
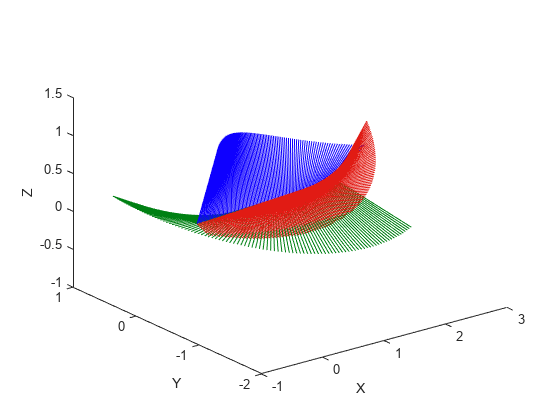
2 つの向きと位置から変換を作成します。内挿する時間間隔と時間のベクトルを指定します。
t0 = axang2tform([0 1 1 pi/4])*trvec2tform([0 0 0]); tF = axang2tform([1 0 1 6*pi/5])*trvec2tform([1 1 1]); tInterval = [0 1]; tvec = 0:0.01:1;
点の間を内挿します。plotTransformsを使用して軌跡をプロットします。変換を四元数の回転と線形遷移に変換します。Figure に座標系のすべての中間変換が表示されます。
[tfInterp, v1, a1] = transformtraj(t0,tF,tInterval,tvec); rotations = tform2quat(tfInterp); translations = tform2trvec(tfInterp); plotTransforms(translations,rotations) xlabel('X') ylabel('Y') zlabel('Z')
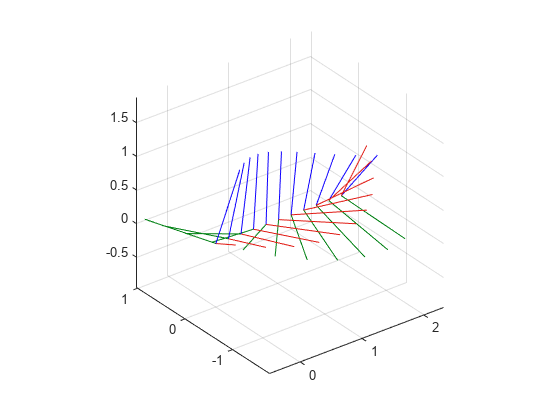
最初の変換を軸角度回転から構築し、最終変換を軸角度回転と並進の両方から構築します。
t0 = se3([0 1 1 pi/4],"axang"); tF = se3([1 0 1 6*pi/5],"axang")*se3([1 1 1],"trvec");
内挿する時間間隔と時間のベクトルを指定します。
tInterval = [0 1]; tvec = 0:0.01:1;
同次変換の間を内挿します。plotTransforms を使用して軌跡をプロットします。
[tfInterp] = transformtraj(t0,tF,tInterval,tvec); plotTransforms(tfInterp(1:10:end))
入力引数
名前と値の引数
出力引数
参照
[1] Lynch, Kevin M., and Frank C. Park. Modern Robotics: Mechanics, Planning, and Control. Cambridge University Press, 2017.