bsplinepolytraj
B スプラインを使用した多項式軌跡の生成
説明
例
一連の 2 次元 "xy" 制御点を指定して、関数 bsplinepolytraj を使用します。これらの制御点を使用して、多角形の内側に B スプラインで軌跡が作成されます。軌跡の開始時間と終了時間も指定します。
cpts = [1 4 4 3 -2 0; 0 1 2 4 3 1]; tpts = [0 5];
B スプライン軌跡を計算します。関数は、制御点を使用してウェイポイントを通る多項式の軌跡の位置 (q)、速度 (qd)、加速度 (qdd)、時間ベクトル (tvec)、および多項式係数 (pp) を出力します。
tvec = 0:0.01:5; [q,qd,qdd,pp] = bsplinepolytraj(cpts,tpts,tvec);
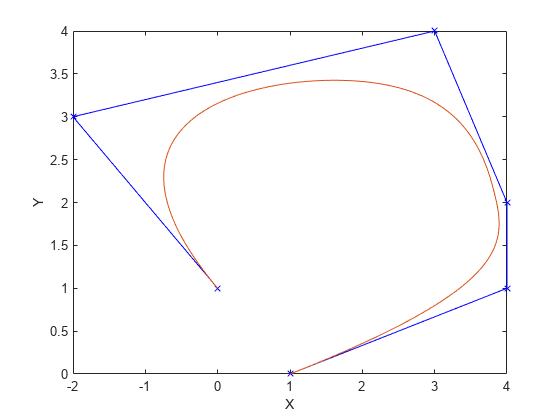
結果をプロットします。制御点とその内側の結果の軌跡を表示します。
figure plot(cpts(1,:),cpts(2,:),'*--') hold on plot(q(1,:),q(2,:)) xlabel("X") ylabel("Y") legend("Control Points","B-Spline Trajectory") axis padded hold off
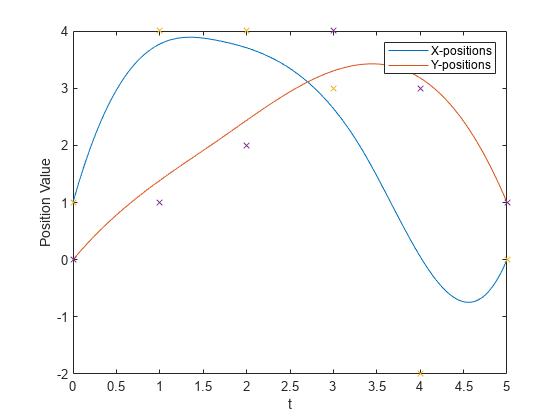
B スプライン軌跡の各要素の位置をプロットします。これらの軌跡は、時間でパラメーター化された 3 次区分的多項式です。
figure plot(tvec,q); hold on ax = gca; ax.ColorOrderIndex = 1; scatter([0:length(cpts)-1],cpts,'*') xlabel("Time") ylabel("Position") title("X- and Y-Trajectories and Control Points") axis padded legend("X-positions","Y-positions","X-control points","Y-control points",Location="southwest") hold off
B スプラインで内挿するウェイポイントを作成します。
wpts1 = [0 1 2.1 8 4 3]; wpts2 = [0 1 1.3 .8 .3 .3]; wpts = [wpts1; wpts2]; L = length(wpts) - 1;
制御多角形の内側の点の計算に使用する行列を作成します。
r = zeros(L+1, size(wpts,1)); A = eye(L+1); for i= 1:(L-1) A(i+1,(i):(i+2)) = [1 4 1]; r(i+1,:) = 6*wpts(:,i+1)'; end
終点をオーバーライドし、r0 と rL を選択します。
A(2,1:3) = [3/2 7/2 1]; A(L,(L-1):(L+1)) = [1 7/2 3/2]; r(1,:) = (wpts(:,1) + (wpts(:,2) - wpts(:,1))/2)'; r(end,:) = (wpts(:,end-1) + (wpts(:,end) - wpts(:,end-1))/2)'; dInterior = (A\r)';
完全な制御多角形を作成し、bsplinepolytraj を使用して新しい制御点で多項式を計算します。
cpts = [wpts(:,1) dInterior wpts(:,end)]; t = 0:0.01:1; q = bsplinepolytraj(cpts, [0 1], t);
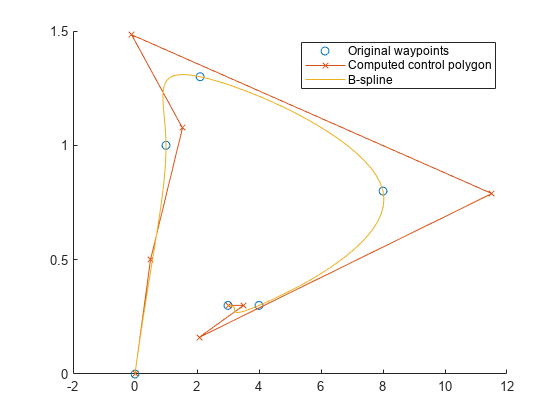
結果をプロットします。元のウェイポイント、計算された多角形、および内挿された B スプラインを表示します。
figure; hold all plot(wpts1, wpts2, 'o'); plot(cpts(1,:), cpts(2,:), 'x-'); plot(q(1,:), q(2,:)); legend('Original waypoints', 'Computed control polygon', 'B-spline');
[1] Farin, Section 9.1
入力引数
出力引数
参照
[1] Farin, Gerald E. Curves and Surfaces for Computer Aided Geometric Design: A Practical Guide. San Diego, CA: Academic Press, 1993.
拡張機能
バージョン履歴
R2019a で導入