trapveltraj
台形速度プロファイルを使用した軌跡の生成
構文
説明
[ は、ペアの引数 q,qd,qdd,tSamples,pp] = trapveltraj(wayPoints,numSamples,Name,Value)Name,Value を使用して追加のパラメーターを指定します。
例
一連の 2 次元 "xy" ウェイポイントを指定して、関数 trapveltraj を使用します。
wpts = [0 45 15 90 45; 90 45 -45 15 90];
指定したサンプル数 (501) の軌跡を計算します。関数は、台形速度を使用してウェイポイントを得る多項式の軌跡の位置 (q)、速度 (qd)、加速度 (qdd)、時間ベクトル (tvec)、および多項式係数 (pp) を出力します。
[q,qd,qdd,tvec,pp] = trapveltraj(wpts,501);
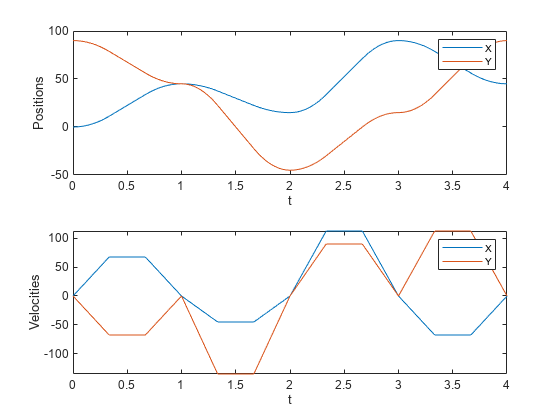
各ウェイポイント間の "x" 位置および "y" 位置と台形速度プロファイルの軌跡をプロットします。
subplot(2,1,1) plot(tvec, q) xlabel('t') ylabel('Positions') legend('X','Y') subplot(2,1,2) plot(tvec, qd) xlabel('t') ylabel('Velocities') legend('X','Y')
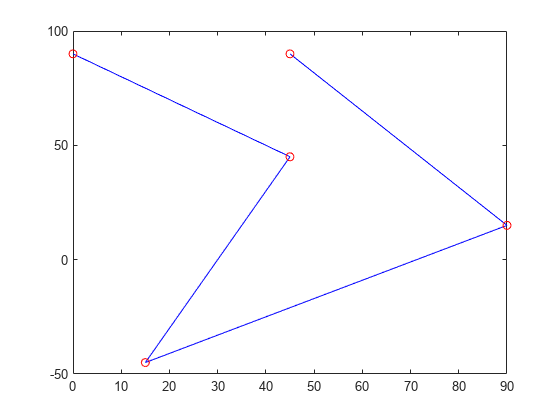
2 次元平面における実際の位置も確認できます。q ベクトルとウェイポイントの個別の行を、"x" 位置および *y* 位置としてプロットします。
figure plot(q(1,:),q(2,:),'-b',wpts(1,:),wpts(2,:),'or')
入力引数
名前と値の引数
出力引数
参照
[1] Lynch, Kevin M., and Frank C. Park. Modern Robotics: Mechanics, Planning and Control. Cambridge: Cambridge University Press, 2017.
[2] Spong, Mark W., Seth Hutchinson, and M. Vidyasagar. Robot Modeling and Control. John Wiley & Sons, 2006.
拡張機能
バージョン履歴
R2019a で導入