cubicpolytraj
3 次多項式軌跡の生成
構文
説明
例
一連の 2 次元 "xy" ウェイポイントを指定して、関数 cubicpolytraj を使用します。ウェイポイントの時間点も指定します。
wpts = [1 4 4 3 -2 0; 0 1 2 4 3 1]; tpts = 0:5;
軌跡をサンプリングする時間ベクトルを指定します。指定した時間点よりも短い間隔でサンプリングします。
tvec = 0:0.01:5;
3 次軌跡を計算します。関数は、3 次多項式の軌跡の位置 (q)、速度 (qd)、加速度 (qdd)、および多項式係数 (pp) を出力します。
[q,qd,qdd,pp] = cubicpolytraj(wpts,tpts,tvec);
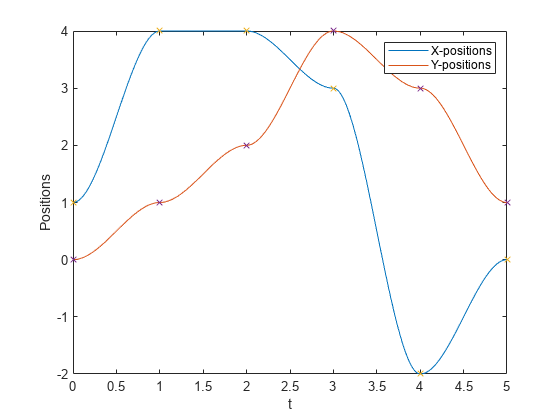
"x" 位置および "y" 位置の 3 次軌跡をプロットします。軌跡を各ウェイポイントと比較します。
plot(tvec,q) hold on plot(tpts,wpts,"x") xlabel("Time") ylabel("Positions") legend("X-positions","Y-positions")'
ans =
Legend (X-positions, Y-positions) with properties:
String: {'X-positions' 'Y-positions'}
Location: 'northeast'
Orientation: 'vertical'
FontSize: 9
Position: [0.6891 0.8011 0.1975 0.0931]
Units: 'normalized'
Show all properties
title(["Cubic Trajectory","X- and Y-Positions"]) axis padded hold off
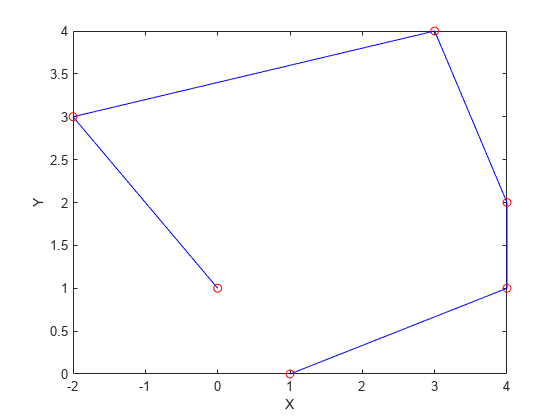
2 次元平面における実際の位置も確認できます。q ベクトルとウェイポイントの個別の行を、"x" 位置および *y* 位置としてプロットします。
figure plot(q(1,:),q(2,:)) hold on scatter(wpts(1,:),wpts(2,:)) xlabel("X") ylabel("Y") title("Cubic Trajectory") axis padded
入力引数
名前と値の引数
出力引数
拡張機能
バージョン履歴
R2019a で導入