オフロードでの重機の自律運転
Robotics System Toolbox™ Offroad Autonomy Library を使用して、建設業、農業、鉱業の用途におけるオフロードのビークルおよび重機の自律システムを開発します。このサポート パッケージには、自律アルゴリズムの設計、シミュレーション、およびテストを行うための専用のツールが用意されています。このサポート パッケージでは、Unreal Engine® との統合により、フォトリアリスティックなシナリオ シミュレーションを使用して、ダンプカーやバックホーなどのオフロード車の性能を多様な条件下でテストして調整できます。
Robotics System Toolbox Offroad Autonomy Library サポート パッケージをダウンロードするには、Robotics System Toolbox Offroad Autonomy Library サポート パッケージのインストールを参照してください。
Robotics System Toolbox での Unreal Engine の使用の詳細については、Unreal Engine シナリオ シミュレーションを参照してください。
関数
offroadControllerMPPI | Local path planner for offroad vehicles and heavy machinery using MPPI algorithm (R2024b 以降) |
articulatedSteeringKinematics | Articulated steering vehicle model (R2025a 以降) |
traversabilityMap | Create traversability map using elevation data and semantic cost of terrain (R2025a 以降) |
ブロック
シーン
| Offroad Pit Mining Scene | Offroad pit mining scene in Unreal Engine environment |
| Construction Site Scene | Construction site scene in Unreal Engine environment |
| Rolling Vineyard | Vineyard on rolling hills in Unreal Engine environment |
トピック
リファレンス アプリケーション
- 露天掘り鉱山での自律運搬トラックのオフロード ナビゲーション
シリーズでは、自律運搬トラックが平坦でない地形を移動して障害物を回避できるようにする一連のプランナーを作成する方法を説明します。 (R2024a 以降)
- ステップ 1: Create Route Planner for Offroad Navigation Using Digital Elevation Data
- ステップ 2: Create Onramp and Terrain-Aware Global Planners for Offroad Navigation
- ステップ 3: Navigate Global Path Through Offroad Terrain Using Local Planner
- ステップ 4: Create Path Following Model Predictive Controller
- ステップ 5: Model and Control Autonomous Vehicle in Offroad Scenario
パス追従トピック
- Introduction to Model Predictive Path Integral (MPPI) Controller
Path planning using Model Predictive Path Integral (MPPI) with adaptable vehicle models. (R2026a 以降)
サポート パッケージのセットアップ
- Robotics System Toolbox Offroad Autonomy Library サポート パッケージのインストール
オフロードの重機のアルゴリズムを設計、シミュレート、検証するためのアドオンを使用する。
注目の例

Simulate Earth Moving with Autonomous Excavator in Construction Site
Simulate ground excavation to create a depression and move spoil to dump truck and further relocate it to another site.

露天掘り鉱山での自律運搬トラックのオフロード ナビゲーション
シリーズでは、自律運搬トラックが平坦でない地形を移動して障害物を回避できるようにする一連のプランナーを作成する方法を説明します。

Simulate Construction Vehicles in Unreal Engine for Material Handling
Set up a simulation in which backhoe loads construction bricks into a dump truck in an Unreal Engine construction site scene.
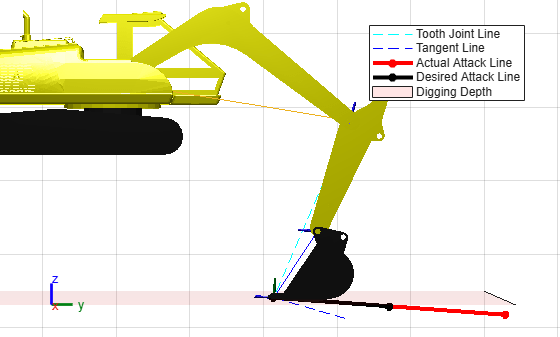
Constrain Links of Excavator for Earth Moving
Solve joint angles for excavator digging, grading, and unloading trajectories with GIK.

Plan Collision-Free Path for Excavator Arm in MATLAB With Lidar Data
Plan path for excavator arm in environment generated from lidar data.

Survey Pit Mining Site with RTK GPS and Point Clouds
Generate a digital elevation model (DEM) of a site using real-time kinematic (RTK) GPS and aerial lidar data.

Extract Scene From Lidar Data
Create map of environment using point cloud data from lidar sensors mounted on an excavator.
Generate Traversability Map for Offroad Terrain Using Semantic Segmentation
Create real-time traversability map for offroad terrain by fusing semantic segmentation from camera images with lidar point clouds.