occupancyMap3D
3 次元占有マップの作成
説明
occupancyMap3D オブジェクトは、各ノードが占有の可能性を示す確率値を格納する八分木データ構造を使用して、3 次元環境を表現します。この確率的八分木は、任意の環境の効率的なモデリングを可能にし、新しい観測値を追加するにつれてそのサイズを動的に拡張します。点群または特定の xyz 位置を使用してマップを更新できます。八分木構造は、必要に応じてデータをトリミングすることで、メモリおよびディスクの使用量を自動的に管理します。
作成
説明
omap = occupancyMap3D
omap = occupancyMap3D(res)Resolution プロパティを設定します。
omap = occupancyMap3D(res,Name,Value)"FreeThreshold",0.25 では、セルを障害物なしと見なすしきい値を 0.25 の確率値として設定します。
プロパティ
オブジェクト関数
checkOccupancy | 位置がフリーか占有かをチェック |
getOccupancy | 位置の占有確率を取得 |
inflate | 各占有位置のインフレーション |
insertPointCloud | 3 次元の点または点群の観測値をマップに挿入 |
rayIntersection | Find intersection points of rays and occupied map cells |
setOccupancy | 位置の占有確率を設定 |
show | Display 3-D occupancy map |
updateOccupancy | 特定位置の占有確率を更新 |
例
occupancyMap3D オブジェクトは、センサーの観測値を使用して環境のマップを作成して、障害物を 3 次元空間に格納します。マップを作成し、点群から障害物を特定する点を追加します。次にマップ内の障害物をインフレートして、障害物の周囲の安全な動作空間を確保します。
10 セル数/メートルのマップ解像度で occupancyMap3D オブジェクトを作成します。
map3D = occupancyMap3D(10);
一連の 3 次元の点を姿勢 [x y z qw qx qy qz] からの観測値として定義します。この姿勢はこれらの点を観測するセンサー用で、中心が原点上にあります。複数の観測値を挿入する 2 組の点を定義します。
pose = [ 0 0 0 1 0 0 0]; points = repmat((0:0.25:2)', 1, 3); points2 = [(0:0.25:2)' (2:-0.25:0)' (0:0.25:2)']; maxRange = 5;
insertPointCloud を使用して 1 組目の点を挿入します。この関数は、センサーの姿勢と指定された点を使用して、観測値をマップに挿入します。表示されている色は、わかりやすく説明する目的のためにのみ点の高さと関連します。
insertPointCloud(map3D,pose,points,maxRange) show(map3D)
![Figure contains an axes object. The axes object with title Occupancy Map, xlabel X [meters], ylabel Y [meters] contains an object of type patch.](../../examples/nav/win64/Create3DOccupancyMapAndInflatePointsExample_01.png)
2 組目の点を挿入します。センサーの姿勢 (原点) とこれらの点の間の光線は、前に挿入した点とオーバーラップします。したがって、センサーと新しい点の間の自由空間が更新されて、自由空間とマークされます。
insertPointCloud(map3D,pose,points2,maxRange) show(map3D)
![Figure contains an axes object. The axes object with title Occupancy Map, xlabel X [meters], ylabel Y [meters] contains an object of type patch.](../../examples/nav/win64/Create3DOccupancyMapAndInflatePointsExample_02.png)
マップをインフレートして、障害物の周囲の安全な動作のためにバッファー ゾーンを追加します。ビークル半径と安全距離を定義し、これらの値の合計を使ってマップのインフレーション半径を定義します。
vehicleRadius = 0.2; safetyRadius = 0.3; inflationRadius = vehicleRadius + safetyRadius; inflate(map3D, inflationRadius); show(map3D)
![Figure contains an axes object. The axes object with title Occupancy Map, xlabel X [meters], ylabel Y [meters] contains an object of type patch.](../../examples/nav/win64/Create3DOccupancyMapAndInflatePointsExample_03.png)
アルゴリズム
八分木データ構造は、1 つの環境を "ボクセル" と呼ばれる 3 次ボリュームに分割するために使用される階層構造です。特定のマップ ボリュームでは、目的のマップ分解能 (ボクセル サイズ) に達するまで空間が 8 つのボクセルに再帰的に分割されます。このサブ分割はツリーとして表すことができ、マップ内の位置の確率値を格納します。
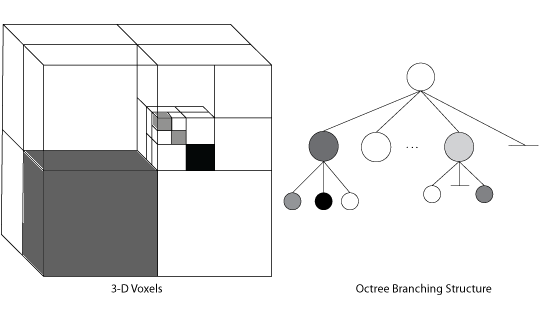
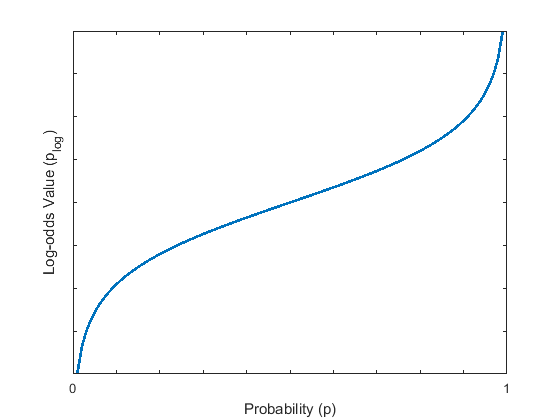
ツリー内の確率値には対数オッズ表現を使用できます。この表現により、位置を動的な測定から簡単に回復でき、小さな確率による数値誤差が少なくなります。この対数オッズ表現を使用して同じ占有値を共有する場合、メモリの効率を維持するために、構造内でツリーの下位の分岐が枝刈りされます。
このオブジェクトは、分岐の枝刈りなど、このデータ構造の編成を内部で処理します。setOccupancy、getOccupancy、insertPointCloud などの関数を使う場合、すべての観測値を空間座標系として指定します。オブジェクトでのツリーへの挿入、ツリー内の移動は、空間座標系およびマップの分解能に基づいて決まります。
参照
[1] Hornung, Armin, Kai M. Wurm, Maren Bennewitz, Cyrill Stachniss, and Wolfram Burgard. "OctoMap: an efficient probabilistic 3D mapping framework based on octrees." Autonomous Robots 34, no. 3 (April 2013): 189–206. https://doi.org/10.1007/s10514-012-9321-0.
拡張機能
バージョン履歴
R2019b で導入
参考
オブジェクト
関数
checkMapCollision|insertPointCloud|inflate|setOccupancy|show|rosReadOccupancyMap3D(ROS Toolbox)