LiDAR レジストレーション アナライザー
説明
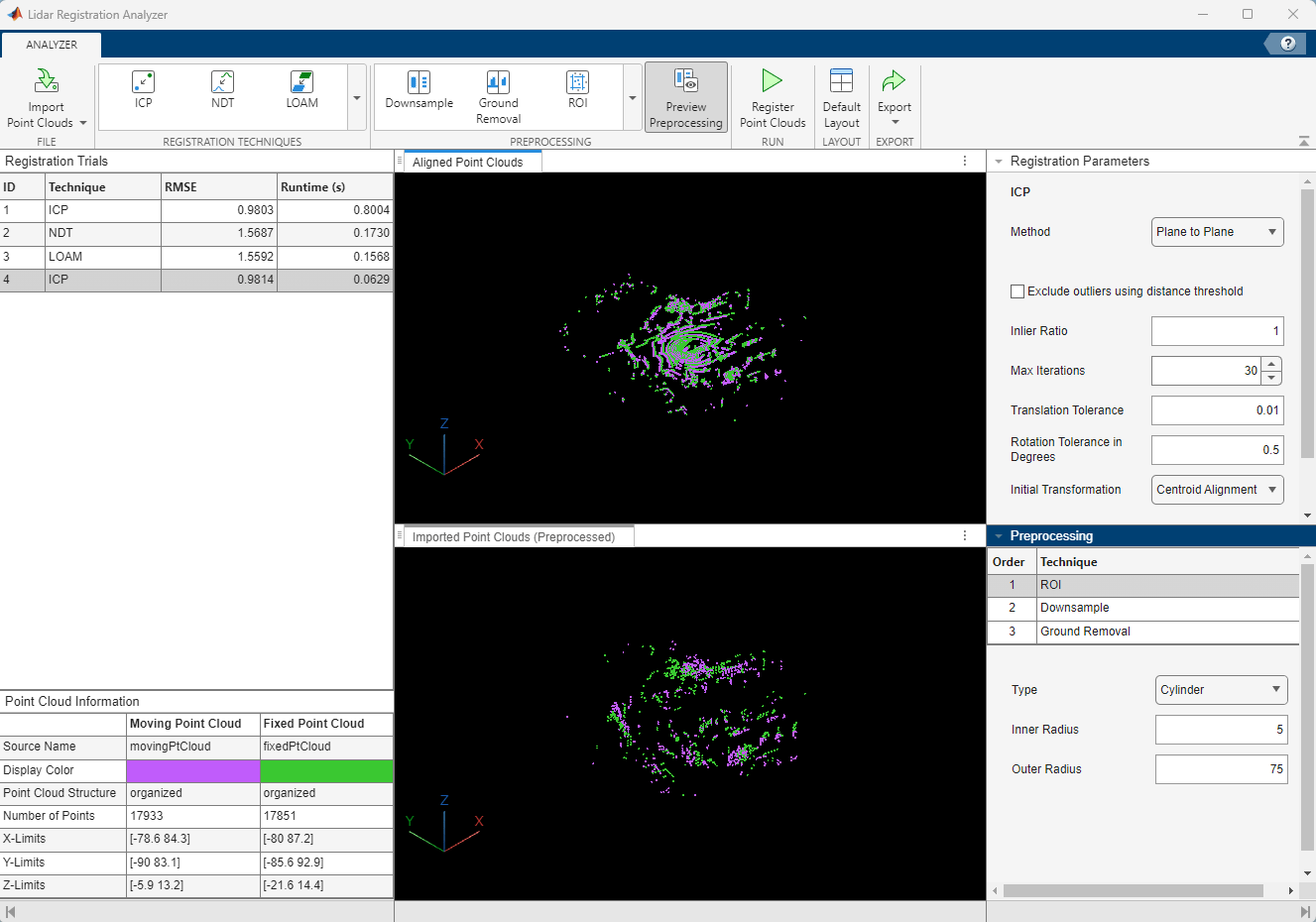
LiDAR レジストレーション アナライザー アプリを使用すると、対話的に点群のレジストレーションを行い、さまざまなレジストレーション手法の使用結果を比較できます。このアプリでは、対話的に次ができます。
点群のレジストレーションを行う
点群の配置を可視化する
点群の前処理手法を適用して、レジストレーションの速度と精度を最適化する
レジストレーションおよび前処理のパラメーターを調整する
レジストレーションを試行する前に、元の点群と前処理済みの点群を表示して、点群の前処理の効果をプレビューする
このアプリの詳細については、Get Started with the Lidar Registration Analyzer Appを参照してください。
LiDAR レジストレーション アナライザー アプリを開く
MATLAB® ツールストリップ: [アプリ] タブの [イメージ処理とコンピューター ビジョン] の下にあるアプリ アイコン
 をクリックします。
をクリックします。MATLAB コマンド プロンプト: 「
lidarRegistrationAnalyzer」と入力します。
プログラムでの使用
ヒント
点群のレジストレーションを行うために、前処理手順を含める必要はありません。前処理手順を適用する前に点群のレジストレーションを行うと、良好な初期評価が得られることがあります。前処理手法の使用の詳細については、Add Preprocessing Steps for Point Cloud Registrationを参照してください。
アルゴリズム
LiDAR レジストレーション アナライザー アプリには、点群を配置するためのさまざまなレジストレーション手法が用意されています。次の表は、それらの手法をまとめています。
| 手法 | 説明 | 反復 | アンオーガナイズド点群のサポート | 初期変換に依存 | 特徴ベース |
|---|---|---|---|---|---|
| 反復最近接点 (ICP) | 複数の点について、点と点、点と面、面と面の距離が最小になるように点群を配置します。 | ✓ | ✓ | ✓ | X |
| 正規分布変換 (NDT) | 各ボクセルで正規分布を使用して、点群を最良に配置する変換を求めます。 | ✓ | ✓ | ✓ | X |
| LiDAR のオドメトリと地図作成 (LOAM) | 特徴ベースの手法であり、2 つの点群について端点と表面の点の検出と対応付けを行ってから、対応する点の距離が最小になるように点群を配置します。 | ✓ | X | ✓ | ✓ |
| 高速グローバル レジストレーション (FGR) | グローバルなレジストレーション方法。初期変換がなく、初期の位置ずれが大きく影響する場合に推奨されます。高速点特徴ヒストグラム (FPFH) の特徴に基づきます。 | ✓ | ✓ | X | ✓ |
| 位相相関 | LiDAR センサーを水平方向に取り付け、変換が X-Y 平面の並進と Z 軸回りの回転で記述できる平面上を移動する地上ビークルに推奨されます。 | X | ✓ | X | X |
| コヒーレント点ドリフト (CPD) | 計算量の多い手法であり、約 10,000 点以下の小さい点群、または大幅にダウンサンプリングした大規模点群に推奨されます。 | ✓ | ✓ | X | X |
バージョン履歴
R2024a で導入
参考
アプリ
関数
pcregistericp|pcregisterndt|pcregisterloam|pcregisterfgr|pcregistercpd|pcregistercorr|pcfitplane|findPointsInCylinder|findPointsInROI|pcdownsample|segmentGroundSMRF