LiDAR ラベラー入門
LiDAR ラベラー アプリを使用すると、点群または点群シーケンスのグラウンド トゥルース データに対話的にラベルを付けて、対応するグラウンド トゥルース データを生成できます。
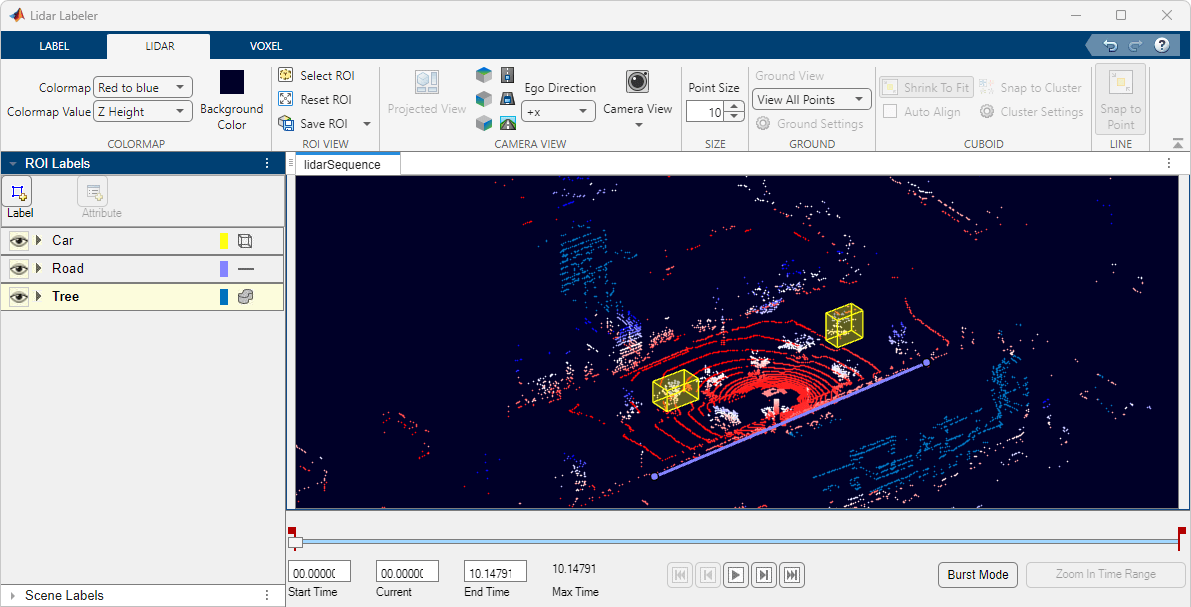
Use these steps to label point cloud data using the Lidar Labeler app.
LiDAR ラベラー アプリを使用すると、点群または点群シーケンスのグラウンド トゥルース データに対話的にラベルを付けて、対応するグラウンド トゥルース データを生成できます。
Use these steps to label point cloud data using the Lidar Labeler app.