estimateNetworkOutputBounds
Syntax
Description
Add-On Required: This feature requires the AI Verification Library for Deep Learning Toolbox add-on.
dlnetwork bounds
[
computes lower and upper output bounds, YLower,YUpper] = estimateNetworkOutputBounds(net,XLower,XUpper)YLower and
YUpper, respectively, for the network net for
input within the bounds specified by XLower and
XUpper.
The function uses abstract interpretation to compute the range of output values that the network returns when the input is between the specified lower and upper bounds. Use this function to determine the sensitivity of the network predictions to input perturbations. Abstract interpretation can introduce overapproximations so these bounds may not be tight.
[
computes lower and upper output bounds with additional options specified by one or more
name-value arguments. YLower,YUpper] = estimateNetworkOutputBounds(___,Name=Value)
ONNX and PyTorch network bounds
This feature requires the Deep Learning Toolbox Interface for alpha-beta-CROWN Verifier add-on.
[
computes lower and upper output bounds with additional options specified by one or more
name-value arguments. YLower,YUpper] = estimateNetworkOutputBounds(___,Name=Value)
Examples
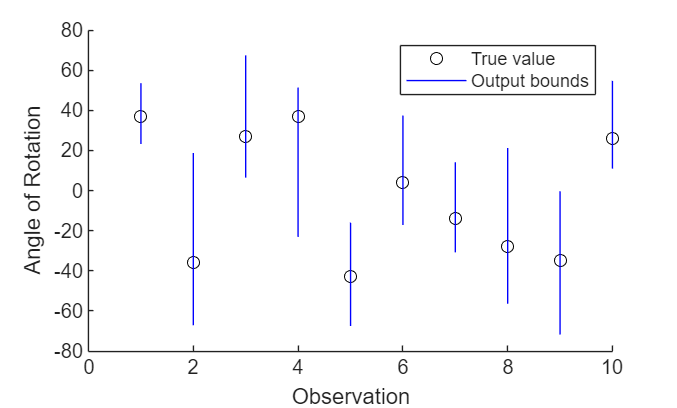
Estimate the output bounds for an image regression network.
Load a pretrained regression network. This network is a dlnetwork object that has been trained to predict the rotation angle of images of handwritten digits.
load("digitsRegressionNetwork.mat");Load the test data.
[XTest,~,TTest] = digitTest4DArrayData;
Select the first ten images.
X = XTest(:,:,:,1:10); T = TTest(1:10);
Convert the test images to dlarray objects.
X = dlarray(X,"SSCB");Estimate the output bounds for an input perturbation between –0.01 and 0.01 for each pixel. Create lower and upper bounds for the input.
perturbation = 0.01; XLower = X - perturbation; XUpper = X + perturbation;
Estimate the output bounds for each input.
[YLower,YUpper] = estimateNetworkOutputBounds(net,XLower,XUpper);
The output bounds are dlarray objects. To plot the output bounds, first extract the data using extractdata.
YLower = extractdata(YLower); YUpper = extractdata(YUpper);
Visualize the output bounds.
figure hold on for i = 1:10 plot(i,T(i),"ko") line([i i],[YLower(i) YUpper(i)],Color="b") end hold off xlim([0 10]) xlabel("Observation") ylabel("Angle of Rotation") legend(["True value","Output bounds"])

Since R2026a
Load a pretrained regression network. This network is a dlnetwork object that has been trained to predict the rotation angle of images of handwritten digits.
load("digitsRegressionNetwork.mat");Load the test data.
[XTest,~,TTest] = digitTest4DArrayData;
Select the first ten images.
X = XTest(:,:,:,1:10); T = TTest(1:10);
Convert the test images to dlarray objects.
X = dlarray(X,"SSCB");Estimate the output bounds for an input perturbation between –0.01 and 0.01 for each pixel. Create lower and upper bounds for the input.
perturbation = 0.01; XLower = X - perturbation; XUpper = X + perturbation;
Create an AlphaCROWN options object. Optimize the upper bound and optimize over the average objective.
opts = alphaCROWNOptions(InitialLearnRate=0.9,MaxEpochs=20, ... Objective="upper", ... ObjectiveMode="average", ... Verbose=true);
Estimate the output bounds for each input.
[YLower,YUpper] = estimateNetworkOutputBounds(net,XLower,XUpper);
The output bounds are dlarray objects. To plot the output bounds, first extract the data using extractdata.
YLower = extractdata(YLower); YUpper = extractdata(YUpper);
Visualize the output bounds.
figure hold on for i = 1:10 plot(i,T(i),"ko") line([i i],[YLower(i) YUpper(i)],Color="b") end hold off xlim([0 10]) xlabel("Observation") ylabel("Angle of Rotation") legend(["True value","Output bounds"])
Since R2026a
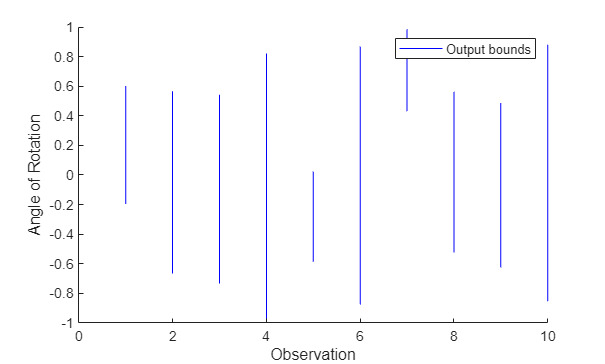
Load a pretrained image regression PyTorch network. This network has been trained to predict the rotation angle of images of handwritten digits.
modelfile = "digitsRotationConvolutionNet.pt";Load the test data.
[XTest,~,TTest] = digitTest4DArrayData;
Select the first ten images.
X = XTest(:,:,:,1:10); T = TTest(1:10);
Estimate the output bounds for an input perturbation between –0.01 and 0.01 for each pixel. Create lower and upper bounds for the input.
perturbation = 0.01; XLower = X - perturbation; XUpper = X + perturbation;
Estimate the output bounds for each input using alpha-CROWN.
options = outputBoundsOptions(Method="alpha-CROWN",Iteration=10);
[YLower,YUpper] = estimateNetworkOutputBounds(modelfile,XLower,XUpper,Algorithm=options,InputDataPermutation=[4 3 1 2]);Visualize the output bounds.
figure hold on for i = 1:10 line([i i],[YLower(i) YUpper(i)],Color="b") end hold off xlim([0 10]) xlabel("Observation") ylabel("Angle of Rotation") legend("Output bounds")
Input Arguments
Name-Value Arguments
Output Arguments
Algorithms
References
[1] Goodfellow, Ian J., Jonathon Shlens, and Christian Szegedy. “Explaining and Harnessing Adversarial Examples.” Preprint, submitted March 20, 2015. https://arxiv.org/abs/1412.6572.
[2] Singh, Gagandeep, Timon Gehr, Markus Püschel, and Martin Vechev. “An Abstract Domain for Certifying Neural Networks”. Proceedings of the ACM on Programming Languages 3, no. POPL (January 2, 2019): 1–30. https://doi.org/10.1145/3290354.
[3] Singh, Gagandeep, Timon Gehr, Markus Püschel, and Martin Vechev. “An Abstract Domain for Certifying Neural Networks.” Proceedings of the ACM on Programming Languages 3, no. POPL (January 2, 2019): 1–30. https://doi.org/10.1145/3290354.
[4] Zhang, Huan, Tsui-Wei Weng, Pin-Yu Chen, Cho-Jui Hsieh, and Luca Daniel. “Efficient Neural Network Robustness Certification with General Activation Functions.” arXiv, 2018. https://doi.org/10.48550/ARXIV.1811.00866.
[5] Xu, Kaidi, Zhouxing Shi, Huan Zhang, Yihan Wang, Kai-Wei Chang, Minlie Huang, Bhavya Kailkhura, Xue Lin, and Cho-Jui Hsieh. “Automatic Perturbation Analysis for Scalable Certified Robustness and Beyond.” arXiv, 2020. https://doi.org/10.48550/ARXIV.2002.12920.
[6] Xu, Kaidi, Huan Zhang, Shiqi Wang, Yihan Wang, Suman Jana, Xue Lin, and Cho-Jui Hsieh. “Fast and Complete: Enabling Complete Neural Network Verification with Rapid and Massively Parallel Incomplete Verifiers.” arXiv, 2020. https://doi.org/10.48550/ARXIV.2011.13824.