カスタム学習ループを使用したネットワークの学習
この例では、カスタム学習率スケジュールで手書きの数字を分類するネットワークに学習させる方法を示します。
ほとんどのタイプのニューラル ネットワークは、関数trainnetと関数trainingOptionsを使用して学習させることができます。必要なオプション (カスタム ソルバーなど) が trainingOptions 関数に用意されていない場合、自動微分のために dlarray オブジェクトと dlnetwork オブジェクトを使用して独自のカスタム学習ループを定義できます。関数 trainnet を使用して事前学習済みの深層学習ネットワークに再学習させる方法を示す例については、新しいイメージを分類するためのニューラル ネットワークの再学習を参照してください。
深層ニューラル ネットワークの学習は最適化タスクです。ニューラル ネットワークを関数 と見なすことにより (ここで、 はネットワーク入力、 は学習可能なパラメーターのセット)、 を最適化して学習データに基づく損失値を最小化できます。たとえば、与えらえた入力 と対応するターゲット に対して、予測 と の間の誤差が最小になるように、学習可能なパラメーター を最適化します。
使用される損失関数は、タスクのタイプによって異なります。以下に例を示します。
分類タスクの場合、予測とターゲットの間のクロス エントロピー誤差を最小化できます。
回帰タスクの場合、予測とターゲットの間の平均二乗誤差を最小化できます。
勾配降下法を使用して目的を最適化できます。勾配降下法では、学習可能なパラメーターについての損失の勾配を使用して最小化に向けてステップを実行することで、学習可能なパラメーター を反復的に更新することにより、損失 を最小化します。勾配降下法アルゴリズムは通常、 の形式の更新ステップのバリアントを使用して、学習可能なパラメーターを更新します。ここで、 は反復回数、 は学習率、 は勾配 (学習可能なパラメーターについての損失の微分) を表します。
この例では、確率的勾配降下アルゴリズム (モーメンタムなし) を使用して手書きの数字を分類するためにネットワークに学習させます。
学習データの読み込み
関数 imageDatastore を使用して数字データをイメージ データストアとして読み込み、イメージ データが格納されているフォルダーを指定します。
unzip("DigitsData.zip") imds = imageDatastore("DigitsData", ... IncludeSubfolders=true, ... LabelSource="foldernames");
データを学習セットとテスト セットに分割します。splitEachLabel 関数を使用して、データの 10% をテスト用に確保します。
[imdsTrain,imdsTest] = splitEachLabel(imds,0.9,"randomize");この例で使用されるネットワークには、サイズが 28 x 28 x 1 の入力イメージが必要です。学習イメージのサイズを自動的に変更するには、拡張イメージ データストアを使用します。学習イメージに対して実行する追加の拡張演算として、イメージを水平軸方向および垂直軸方向に最大 5 ピクセルだけランダムに平行移動させる演算を指定します。データ拡張は、ネットワークで過適合が発生したり、学習イメージの正確な詳細が記憶されたりすることを防止するのに役立ちます。
inputSize = [28 28 1]; pixelRange = [-5 5]; imageAugmenter = imageDataAugmenter( ... RandXTranslation=pixelRange, ... RandYTranslation=pixelRange); augimdsTrain = augmentedImageDatastore(inputSize(1:2),imdsTrain,DataAugmentation=imageAugmenter);
他のデータ拡張を実行せずにテスト イメージのサイズを自動的に変更するには、追加の前処理演算を指定せずに拡張イメージ データストアを使用します。
augimdsTest = augmentedImageDatastore(inputSize(1:2),imdsTest);
学習データ内のクラスの数を決定します。
classes = categories(imdsTrain.Labels); numClasses = numel(classes);
ネットワークの定義
イメージ分類のネットワークを定義します。
イメージ入力用に、学習データと一致する入力サイズのイメージ入力層を指定します。
イメージ入力は正規化せず、入力層の
Normalizationオプションを"none"に設定します。convolution-batchnorm-ReLU ブロックを 3 つ指定します。
Paddingオプションを"same"に設定して、出力が同じサイズになるように畳み込み層に入力をパディングします。最初の畳み込み層には、サイズ 5 のフィルターを 20 個指定します。残りの畳み込み層には、サイズ 3 のフィルターを 20 個指定します。
分類用に、クラスの数と一致するサイズの全結合層を指定します。
出力を確率にマッピングするために、ソフトマックス層を含めます。
カスタム学習ループを使用してネットワークに学習させる場合、出力層は含めません。
layers = [
imageInputLayer(inputSize,Normalization="none")
convolution2dLayer(5,20,Padding="same")
batchNormalizationLayer
reluLayer
convolution2dLayer(3,20,Padding="same")
batchNormalizationLayer
reluLayer
convolution2dLayer(3,20,Padding="same")
batchNormalizationLayer
reluLayer
fullyConnectedLayer(numClasses)
softmaxLayer];層配列から dlnetwork オブジェクトを作成します。
net = dlnetwork(layers)
net =
dlnetwork with properties:
Layers: [12×1 nnet.cnn.layer.Layer]
Connections: [11×2 table]
Learnables: [14×3 table]
State: [6×3 table]
InputNames: {'imageinput'}
OutputNames: {'softmax'}
Initialized: 1
View summary with summary.
モデル損失関数の定義
深層ニューラル ネットワークの学習は最適化タスクです。ニューラル ネットワークを関数 と見なすことにより (ここで、 はネットワーク入力、 は学習可能なパラメーターのセット)、 を最適化して学習データに基づく損失値を最小化できます。たとえば、与えらえた入力 と対応するターゲット に対して、予測 と の間の誤差が最小になるように、学習可能なパラメーター を最適化します。
modelLoss 関数を定義します。関数 modelLoss は、dlnetwork オブジェクト net、入力データのミニバッチ X とそれに対応するターゲット T を受け取り、net 内の学習可能なパラメーターについての損失と損失の勾配、およびネットワークの状態を返します。勾配を自動的に計算するには、関数 dlgradient を使用します。
function [loss,gradients,state] = modelLoss(net,X,T) % Forward data through network. [Y,state] = forward(net,X); % Calculate cross-entropy loss. loss = crossentropy(Y,T); % Calculate gradients of loss with respect to learnable parameters. gradients = dlgradient(loss,net.Learnables); end
SGD 関数の定義
パラメーターと、パラメーターについての損失の勾配を受け取り、確率的勾配降下アルゴリズムを使用して更新されたパラメーターを返す関数 sgdStep を作成します。このアルゴリズムは として表現されます。ここで、 は反復回数、 は学習率、 は勾配 (学習可能なパラメーターについての損失の微分) を表します。
function parameters = sgdStep(parameters,gradients,learnRate) parameters = parameters - learnRate .* gradients; end
カスタム更新関数の定義は、カスタム学習ループに必要な手順ではありません。あるいは、sgdmupdate、adamupdate、およびrmspropupdateなどの組み込み更新関数を使用することもできます。
学習オプションの指定
ミニバッチ サイズを 128、学習率を 0.01 として 15 エポック学習させます。
numEpochs = 15; miniBatchSize = 128; learnRate = 0.01;
モデルの学習
学習中にイメージのミニバッチを処理および管理するminibatchqueueオブジェクトを作成します。各ミニバッチで次を行います。
カスタム ミニバッチ前処理関数
preprocessMiniBatch(この例の最後に定義) を使用して、ターゲットを one-hot 符号化ベクトルに変換します。イメージ データを次元ラベル
"SSCB"(spatial、spatial、channel、batch) で形式を整えます。既定では、minibatchqueueオブジェクトは、基となる型がsingleのdlarrayオブジェクトにデータを変換します。ターゲットの形式は整えません。部分的なミニバッチは破棄します。
GPU が利用できる場合、GPU で学習を行います。既定では、
minibatchqueueオブジェクトは、GPU が利用可能な場合、各出力をgpuArrayに変換します。GPU を使用するには、Parallel Computing Toolbox™ とサポートされている GPU デバイスが必要です。サポートされているデバイスの詳細については、GPU 計算の要件 (Parallel Computing Toolbox)を参照してください。
mbq = minibatchqueue(augimdsTrain,... MiniBatchSize=miniBatchSize,... MiniBatchFcn=@preprocessMiniBatch,... MiniBatchFormat=["SSCB" ""], ... PartialMiniBatch="discard");
学習の進行状況モニター用に合計反復回数を計算します。
numObservationsTrain = numel(imdsTrain.Files); numIterationsPerEpoch = floor(numObservationsTrain / miniBatchSize); numIterations = numEpochs * numIterationsPerEpoch;
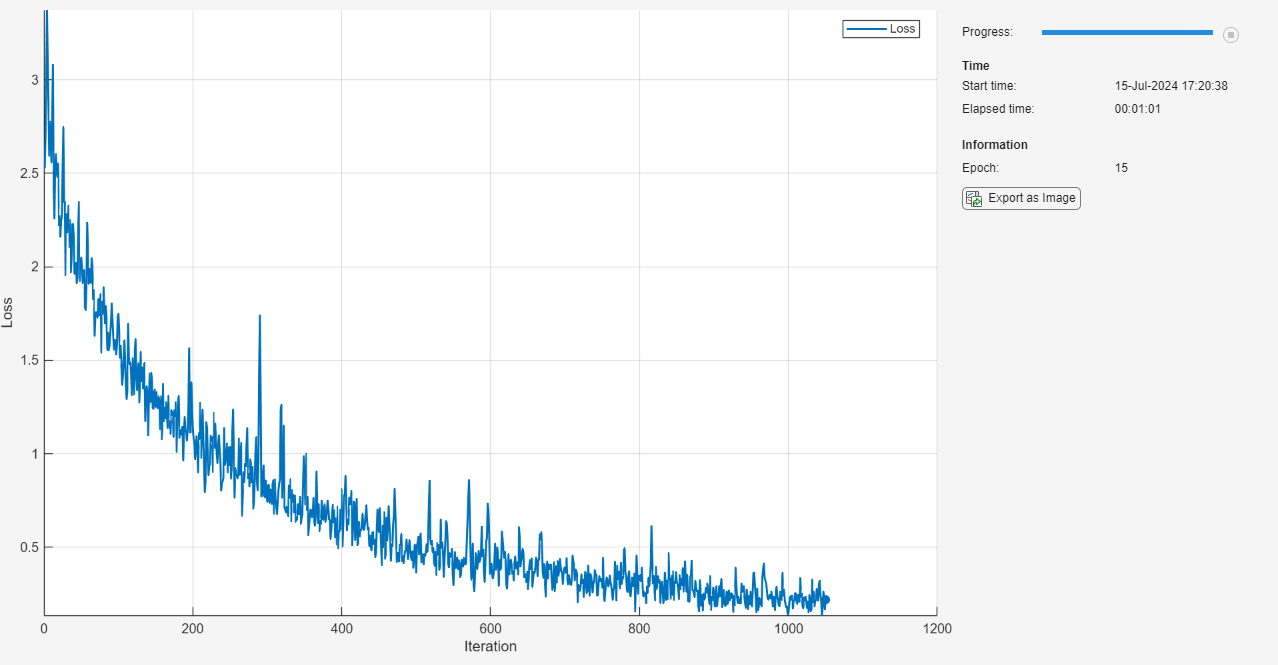
TrainingProgressMonitor オブジェクトを初期化します。監視オブジェクトを作成するとタイマーが開始されるため、学習ループに近いところでオブジェクトを作成するようにしてください。
monitor = trainingProgressMonitor( ... Metrics="Loss", ... Info="Epoch", ... XLabel="Iteration");
カスタム学習ループを使用してネットワークに学習させます。各エポックについて、データをシャッフルしてデータのミニバッチをループで回します。各ミニバッチで次を行います。
関数
dlfevalと関数modelLossを使用してモデルの損失、勾配、および状態を評価し、ネットワークの状態を更新します。カスタム更新関数と共に
dlupdate関数を使用して、ネットワーク パラメーターを更新します。学習の進行状況モニターで、損失とエポックの値を更新します。
モニターの Stop プロパティが true の場合は停止します。[停止] ボタンをクリックすると、
TrainingProgressMonitorオブジェクトの Stop プロパティ値が true に変わります。
epoch = 0; iteration = 0; % Loop over epochs. while epoch < numEpochs && ~monitor.Stop epoch = epoch + 1; % Shuffle data. shuffle(mbq); % Loop over mini-batches. while hasdata(mbq) && ~monitor.Stop iteration = iteration + 1; % Read mini-batch of data. [X,T] = next(mbq); % Evaluate the model gradients, state, and loss using dlfeval and the % modelLoss function and update the network state. [loss,gradients,state] = dlfeval(@modelLoss,net,X,T); net.State = state; % Update the network parameters using SGD. updateFcn = @(parameters,gradients) sgdStep(parameters,gradients,learnRate); net = dlupdate(updateFcn,net,gradients); % Update the training progress monitor. recordMetrics(monitor,iteration,Loss=loss); updateInfo(monitor,Epoch=epoch); monitor.Progress = 100 * iteration/numIterations; end end
モデルのテスト
testnet関数を使用してニューラル ネットワークをテストします。単一ラベルの分類では、精度を評価します。精度は、正しい予測の割合です。既定では、testnet 関数は利用可能な GPU がある場合にそれを使用します。実行環境を手動で選択するには、testnet 関数の ExecutionEnvironment 引数を使用します。
accuracy = testnet(net,augimdsTest,"accuracy")accuracy = 96.3000
混同チャートで予測を可視化します。minibatchpredict関数を使用して予測を行い、scores2label関数を使用して分類スコアをラベルに変換します。既定では、関数 minibatchpredict は利用可能な GPU がある場合にそれを使用します。実行環境を手動で選択するには、minibatchpredict 関数の ExecutionEnvironment 引数を使用します。
scores = minibatchpredict(net,augimdsTest); YTest = scores2label(scores,classes);
混同チャートで予測を可視化します。
TTest = imdsTest.Labels; figure confusionchart(TTest,YTest)

対角線上の大きな値は、対応するクラスに対する正確な予測を示しています。対角線外の大きな値は、対応するクラス間での強い混同を示しています。
サポート関数
ミニ バッチ前処理関数
関数 preprocessMiniBatch は、次の手順を使用して予測子とラベルのミニバッチを前処理します。
関数
preprocessMiniBatchPredictorsを使用してイメージを前処理します。入力 cell 配列からラベル データを抽出し、2 番目の次元に沿って categorical 配列に連結します。
カテゴリカル ラベルを数値配列に one-hot 符号化します。最初の次元への符号化は、ネットワーク出力の形状と一致する符号化された配列を生成します。
function [X,T] = preprocessMiniBatch(dataX,dataT) % Preprocess predictors. X = preprocessMiniBatchPredictors(dataX); % Extract label data from cell and concatenate. T = cat(2,dataT{:}); % One-hot encode labels. T = onehotencode(T,1); end
ミニバッチ予測子前処理関数
関数 preprocessMiniBatchPredictors は、入力 cell 配列からイメージ データを抽出することで予測子のミニバッチを前処理し、数値配列に連結します。グレースケール入力では、4 番目の次元で連結することにより、3 番目の次元が各イメージに追加されます。この次元は、シングルトン チャネル次元として使用されることになります。
function X = preprocessMiniBatchPredictors(dataX) % Concatenate. X = cat(4,dataX{:}); end
参考
trainingProgressMonitor | dlarray | dlgradient | dlfeval | dlnetwork | forward | adamupdate | predict | minibatchqueue | onehotencode | onehotdecode