モデル相互接続のカタログ
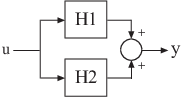
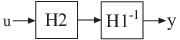
ブロック線図接続の各タイプは、モデル相互接続コマンドまたは演算式に対応します。以下の表は、対応する相互接続コマンドと演算式と共にブロック線図接続をまとめたものです。
モデルの相互接続コマンド





算術演算
次に示す算術演算はほぼすべて、動的システム モデルに適用できます。
| 演算 | 説明 |
|---|---|
+ | 加算 |
|
| 減算 |
|
| 乗算 |
|
| 要素単位の乗算 |
|
| 行列の右除算 |
|
| 行列の左除算 |
|
| 逆行列 |
|
| 共役転置。 |
|
| 転置 |
|
| 動的システム モデルのべき乗。伝達関数を作成するための構文は次のとおりです。 s = tf('s');
G = 25/(s^2 + 10*s + 25); |
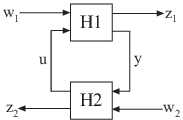
場合によっては、モデル演算の代わりに feedback または connect などのモデル相互接続コマンドを使用すると良い結果が得られることがあります。たとえば、コマンド T = feedback(H1,H2) は代数式 T = H1/(1+H2*H1) より良い結果が得られます。後者の式では H1 の極が重複するため、モデル次数が上がり、計算が不正確になる可能性があります。
参考
connect | feedback | series | parallel