pade
むだ時間をもつモデルのパデ近似
説明
pade は、連続時間 LTL モデルのむだ時間を近似します。このような近似は、連続時間システムのコンテキストにおける伝達遅延や計算遅延などのむだ時間の影響をモデル化する場合に役立ちます。T 秒のむだ時間のラプラス変換は exp(–sT) です。この指数伝達関数は、[1]からのパデ近似式を使用して、有理伝達関数により近似されます。
離散時間モデルを近似するには、absorbDelay を使用します。
むだ時間のあるモデルについての詳細は、線形システムでのむだ時間を参照してください。
例
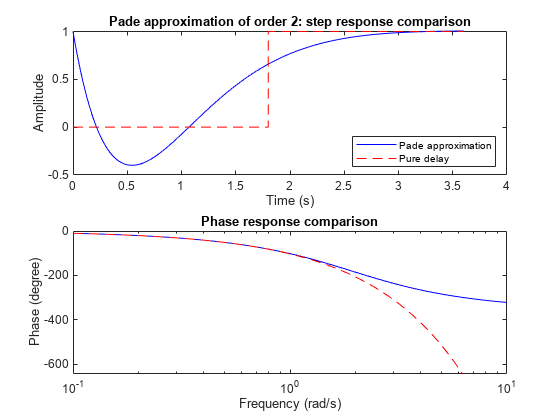
この例では、2 次システムでの 1.8 秒のむだ時間について、遅延のない分子係数と分母係数を計算します。
T = 1.8; N = 2; [num,den] = pade(T,N)
num = 1×3
1.0000 -3.3333 3.7037
den = 1×3
1.0000 3.3333 3.7037
また、遅延のない近似およびむだ時間をもつ元のシステムについて、ステップ応答と位相応答をプロットすることもできます。出力引数を指定せずに pade コマンドを使用して、比較プロットを生成します。
pade(T,N)
この例では、次の連続時間開ループ システムのパデ近似を求めます。
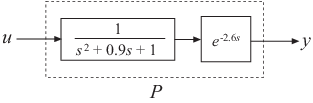
出力遅延をもつ開ループ システムを作成します。
s = tf('s');
T = 2.6;
sys = exp(-T*s)/(s^2+0.9*s+1)sys =
1
exp(-2.6*s) * ---------------
s^2 + 0.9 s + 1
Continuous-time transfer function.
Model Properties
sys は、むだ時間をもつ 2 次伝達関数 (tf) オブジェクトです。
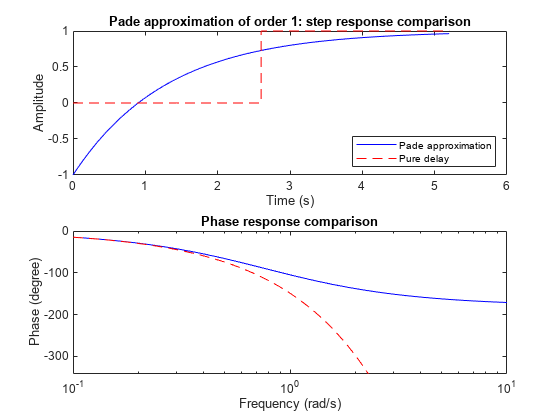
次に、sys の 1 次パデ近似を計算します。
sysx = pade(sys,1)
sysx =
-s + 0.7692
----------------------------------
s^3 + 1.669 s^2 + 1.692 s + 0.7692
Continuous-time transfer function.
Model Properties
pade は、sys のすべてのむだ時間を 1 次近似に置き換えます。そのため、sysx は遅延のない 3 次伝達関数になります。
また、遅延のない近似モデルおよびむだ時間をもつモデルのステップ応答と位相応答をプロットして、比較することもできます。むだ時間と次数の値を使用して、プロットを作成します。
pade(T,1)
0.1 秒の I/O 遅延の 3 次パデ近似を計算します。
s = tf('s');
sys = exp(-0.1*s);
sysx = pade(sys,3)sysx = -s^3 + 120 s^2 - 6000 s + 1.2e05 -------------------------------- s^3 + 120 s^2 + 6000 s + 1.2e05 Continuous-time transfer function. Model Properties
ここで、sys は 0.1 秒の正確なむだ時間の動的システム表現です。sysx は、その遅延を近似する伝達関数です。
真の遅延とその近似の時間応答と周波数応答を比較します。出力引数なしで pade コマンドを呼び出すと、比較プロットが生成されます。この場合、pade の最初の引数は、むだ時間を表す動的システムでなく、正確なむだ時間の大きさです。
pade(0.1,3)

この例では、ssModel.mat に含まれる MIMO 状態空間モデル sys について考えます。sys には 2 入力と 3 出力があり、入力遅延、出力遅延、および内部遅延が含まれています。
データを読み込み、sys を調べます。
load('ssModel.mat','sys') sys
sys =
A =
x1 x2
x1 2.893 1.497
x2 -0.1138 -0.5279
B =
u1 u2
x1 -1.334 -4.155
x2 1.127 -0.06161
C =
x1 x2
y1 -2.416 -0.6317
y2 1.688 1.063
y3 3.509 1.84
D =
u1 u2
y1 1.019 1.999
y2 0 -3.658
y3 0 -5.885
(values computed with all internal delays set to zero)
Input delays (seconds): 1.5 0.3
Output delays (seconds): 0.2 0.8 1.3
Internal delays (seconds): 2.1 1.3
Continuous-time state-space model.
Model Properties
入力遅延、出力遅延、および内部遅延の近似次数を指定し、パデ近似を計算します。近似次数を Inf に設定して、対応する遅延の近似を回避します。
NU = [3 Inf]; NY = [1 Inf 2]; NINT = [Inf 2]; sysx = pade(sys,NU,NY,NINT)
sysx =
A =
x1 x2 x3 x4 x5 x6 x7 x8 x9 x10
x1 -10 0 0 -9.665 -2.527 -7.305 0 16.3 0 4.527
x2 0 -4.615 -3.55 14.04 7.358 21.51 0 0 0 0
x3 0 2 0 0 0 0 0 0 0 0
x4 0 0 0 2.893 1.497 4.115 0 -5.335 0 -1.482
x5 0 0 0 -0.1138 -0.5279 -0.2169 0 4.51 0 1.253
x6 0 0 0 -8.011 -3.193 -4.615 -3.55 0 0 0
x7 0 0 0 0 0 2 0 0 0 0
x8 0 0 0 0 0 0 0 -8 -6.667 -2.222
x9 0 0 0 0 0 0 0 4 0 0
x10 0 0 0 0 0 0 0 0 4 0
B =
u1 u2
x1 -4.075 7.996
x2 0 -23.54
x3 0 0
x4 1.334 -4.155
x5 -1.127 -0.06161
x6 0 10.1
x7 0 0
x8 4 0
x9 0 0
x10 0 0
C =
x1 x2 x3 x4 x5 x6 x7 x8 x9 x10
y1 5 0 0 2.416 0.6317 1.826 0 -4.075 0 -1.132
y2 0 0 0 1.688 1.063 3.074 0 0 0 0
y3 0 -2.308 0 3.509 1.84 5.377 0 0 0 0
D =
u1 u2
y1 1.019 -1.999
y2 0 -3.658
y3 0 -5.885
(values computed with all internal delays set to zero)
Input delays (seconds): 0 0.3
Output delays (seconds): 0 0.8 0
Internal delays (seconds): 2.1
Continuous-time state-space model.
Model Properties
対応する近似次数が Inf の場合、結果の近似 sysx にまだ特定の入力遅延、出力遅延、および内部遅延があります。
入力引数
出力引数
制限
パデ近似は低周波数でのみ有効であり、時間領域近似よりもすぐれた周波数領域近似を提供します。したがって、真の応答と近似の応答を比較して適切な近似次数を選択し、近似の妥当性を確認してください。
高次のパデ近似を計算すると、極が集積した伝達関数ができます。そのような極設定は摂動に極めて敏感になりやすいため、次数
N>10のパデ近似は避けてください。
参照
[1] Golub, Gene H., and Charles F. Van Loan. Matrix Computations. 2nd ed. Johns Hopkins Series in the Mathematical Sciences 3. Baltimore, Md: Johns Hopkins University Press, 1989. pp. 557-558.
バージョン履歴
R2006a より前に導入