Phased Array System Toolbox には、無線通信、レーダー、ソナー、音響などの用途において、センサーアレイおよびビームフォーミング システムの設計とシミュレーションを行うための MATLAB と Simulink のアルゴリズムとアプリが用意されています。サブアレイや任意の形状を含む、アクティブアレイやパッシブアレイの動作のモデル化および解析を行うことができます。また、ツールボックスの関数から C コードを生成することもできます。
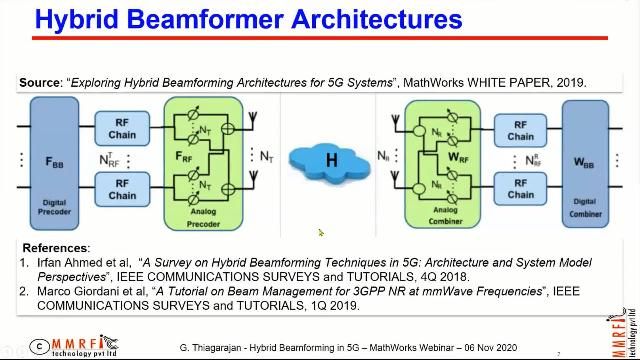
5G や LTE セルラー、SATCOM、無線 LAN 通信システムでは、マルチビームアンテナや電子走査可能なアンテナを設計できます。このツールボックスには、Massive MIMO システムやミリ波システム向けにハイブリッドおよびフルデジタルのビームフォーミング アーキテクチャをシミュレーションするアルゴリズムが付属しています。マルチパス フェージング環境をシミュレーションして、ビームフォーミング アンテナ アレイの性能をテストできます。
レーダー、ソナー、音響システムの設計向けに、ツールボックスには、ビームフォーミング、時空間適応信号処理 (STAP)、到来方向 (DOA) 推定、整合フィルター処理、画像形成などのアルゴリズムが用意されています。また、このツールボックスには、シミュレーション テスト信号の生成や、ターゲットのエコーと干渉のシミュレーションに使用できる連続波形およびパルス波形も用意されています。

フェーズドアレイの設計と解析
アレイのジオメトリ、サブアレイ、カスタムアンテナ素子、偏波、摂動素子など、アクティブ電子走査アレイ (AESA) やパッシブ電子走査アレイ (PESA) の動作のモデル化および解析を行います。
ドキュメンテーション | 例

ビームフォーミングおよび到来方向推定
狭帯域と広帯域のデジタル ビームフォーミング アルゴリズムをモデル化します。適応型ビームフォーマーで干渉を抑制します。STAP 手法を使用して、クラッターを除去します。入射信号の到来方向を推定します。球面波面を使用して、近傍界におけるビームフォーミングをシミュレーションします。
ドキュメンテーション | 例

波形設計および信号合成
パルス波形、連続波形、整合フィルターを設計します。波形の不確定性関数を解析します。モノスタティック アレイおよびバイスタティック アレイの信号とターゲット応答のベースバンド IQ データを合成します。
ドキュメンテーション | 例
MIMO 無線通信
MIMO 通信システムのマルチビームアンテナや電子走査可能なアンテナをモデル化します。ビームフォーミング アーキテクチャをベースバンドと RF サブシステムに分割します。
ドキュメンテーション | 例

レーダーシステムおよび EW システム
レーダーおよび EW 信号処理システムをシミュレーションします。電波妨害と干渉を防ぐために、レーダーの周波数アジリティをモデル化します。波形パラメーターの抽出および受信信号の分類を行います。
ドキュメンテーション | 例

ソナーと空間音響
ターゲット反射、マルチパス伝播、ノイズ干渉の効果など、ソースから受信機までソナーシステムをモデル化します。空間音響システムのビームフォーミングをシミュレーションします。
ドキュメンテーション | 例


製品リソース:
「MATLAB、Phased Array System Toolbox、5G Toolbox を使用した 5G Massive MIMO アレイのハイブリッド ビームフォーミング システム設計は、さまざまなハードウェアの選択肢や、その性能を現実的な 5G のシナリオで評価するのに役立ちました。」
あなたは学生ですか?
ご所属の学校にはすでに Campus-Wide License が導入されていて、MATLAB、Simulink、その他のアドオン製品を利用できる可能性があります。


