checkSetup
設定の検証 (オプション)
説明
ラベル付けアプリにおいて、オートメーション セッション中に [実行] をクリックすると、checkSetup メソッドが設定の有効性をチェックします。checkSetup が true を返した場合、設定は有効なため、アプリは initialize、run、および terminate メソッドを使用して、オートメーション アルゴリズムの実行に進みます。
AutomationAlgorithm のクライアントはこのメソッドを必要に応じて実装できます。
isReady = checkSetup(algObj,labelsToAutomate)labelsToAutomate を提供します。この構文は、ピクセル ラベルのオートメーションをサポートしていません。また、この構文は、時間依存 (時間的) オートメーション アルゴリズムでのみ使用できます。グラウンド トゥルース ラベラー (Automated Driving Toolbox) アプリとビデオ ラベラー アプリは時間的アルゴリズムをサポートしていますが、イメージ ラベラーはサポートしていません。これらのタイプのアルゴリズムの詳細については、時間的オートメーション アルゴリズムを参照してください。
例
入力引数
オートメーション用に選択されているラベル。次の列を持つ table として指定します。
| 列名 | 説明 | ||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
Type | ラベル タイプを保持する
| ||||||||||||
Name | ラベルの名前を保持する文字ベクトル。 | ||||||||||||
Time | ラベルがマークされた時刻を秒単位で指定する double 型のスカラー。 | ||||||||||||
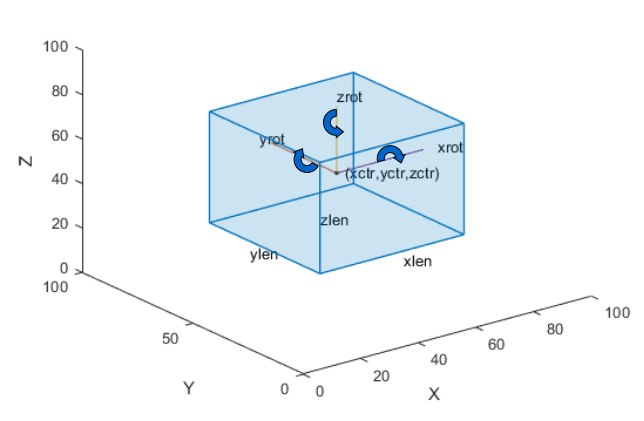
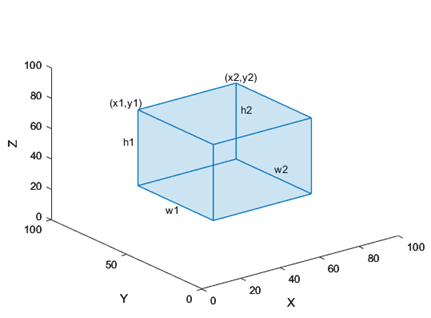
Position | フレーム内のラベルの位置。このベクトルの形式はラベル タイプによって異なります。
|
テーブルの各行が、オートメーション用に選択されたラベルに対応しています。次の labelsToAutomate テーブルには、四角形のラベル、5 個の点を持つラインのラベル、直方体のラベルが含まれています。
Type Name Time Position
_________ ____________ _________ ____________
Rectangle 'Car' 0.033333 [1x4 double]
Line 'LaneMarker' 0.066667 [5x2 double]
Cuboid 'Truck' 0.099999 [1x9 double] 出力引数
バージョン履歴
R2017a で導入