このページの内容は最新ではありません。最新版の英語を参照するには、ここをクリックします。
スイープ正弦波ステアリング操縦
このリファレンス アプリケーションは、スイープ正弦波ステアリング操縦における車両運動モデル全体を表します。独自のバージョンを作成して、車両が通常および極端な運転条件下で設計要件を満たすことをテストするフレームワークを提供できます。リファレンス アプリケーションは車両の走行およびハンドリング解析やシャシー制御開発で使用します。動的なステアリング応答を解析するには、このリファレンス アプリケーションを使用します。
スイープ正弦波ステアリング操縦では、ステアリング入力に対する車両の周波数応答をテストします。このテストでのドライバーの操作は次のとおりです。
車両がターゲット速度に達するまで加速する。
正弦波ステアリング ホイール入力を指示する。
正弦波の周波数を線形に増加させる。
先進運転支援システム (ADAS) および自動運転 (AD) の知覚、計画、および制御ソフトウェアをテストするために、3D 環境で操縦を実行できます。3D 可視化エンジンのプラットフォームの要件やハードウェアの推奨事項については、Unreal Engine シミュレーション環境の要件と制限を参照してください。
スイープ正弦波ステアリング リファレンス アプリケーション プロジェクトの作業コピーを作成して開くには、次のように入力します。
次の表は、リファレンス アプリケーションのブロックとサブシステムをまとめています。一部のサブシステムにはバリアントがあります。
| リファレンス アプリケーションの要素 | 説明 | バリアント |
|---|---|---|
スイープ正弦波ステアリング操縦の正弦波ステアリング指令を生成します。 | ||
加速、制動、ギア、およびステアリングの各指令を生成するためにリファレンス アプリケーションで使用するドライバー モデルを実装します。 既定では、Driver Commands サブシステムのバリアントは Predictive Driver ブロックです。 | ✓ | |
風や道路による力を実装します。 | ✓ | |
エンジン制御ユニット (ECU)、トランスミッション、アンチロック ブレーキ システム (ABS)、およびアクティブ デファレンシャルのコントローラーを実装します。 | ✓ | |
以下を実装します。
| ✓ | |
車両の軌跡、ドライバーの応答、および 3D 可視化を提供します。 メモ 3D 可視化環境でモデルのシミュレーションを実行するには、Simulink® 3D Animation™ が必要です。 | ✓ |
既定のバリアントをオーバーライドするには、[モデル化] タブの [設計] セクションでドロップダウンをクリックします。[一般] セクションで [バリアント マネージャー] を選択します。バリアント マネージャーで、使用するバリアントに移動します。右クリックして [この選択肢を使用してオーバーライド] を選択します。
Swept Sine Reference Generator
Swept Sine Reference Generator ブロックを使用して、スイープ正弦波ステアリング操縦の正弦波ステアリング指令を生成します。
縦方向速度の設定点 — ターゲット速度
ステアリング振幅 — 正弦波の振幅
最終周波数 — 操縦を停止するためのカットオフ周波数
定常状態条件からシミュレーションを開始するには、[定常状態の初期条件] と [定常状態ソルバー] タブのパラメーターを使用します。
詳細については、Swept Sine Reference Generator を参照してください。
Driver Commands
Driver Commands ブロックは、加速、制動、ギア、およびステアリングの各指令を生成するためにリファレンス アプリケーションで使用するドライバー モデルを実装します。既定では、Reference Generator ブロックのパラメーター [操縦固有のドライバー、初期位置、およびシーンを使用] を選択すると、指定した操縦のドライバーがリファレンス アプリケーションで選択されます。
車両指令モード設定 | 実装 |
|---|---|
| Longitudinal Driver ブロック — 縦方向の速度追跡コントローラー。このブロックでは、基準速度とフィードバック速度に基づいて、0 から 1 までの間で変化する正規化された加速指令と制動指令を生成します。このブロックは、ドライバーの動的応答をモデル化したり、縦方向のドライブ サイクルを追跡するために必要な指令を生成したりするために使用します。 |
| Predictive Driver ブロック — 縦方向の速度と横方向の基準変位を追跡するための正規化されたステアリング指令、加速指令、制動指令を生成するコントローラー。正規化された指令は -1 から 1 までの間で変化します。このコントローラーでは、シングルトラック (二輪) モデルを使用して、最適なシングルポイント プレビュー コントロールを行います。 |
| ステアリング、加速、制動、およびギアの各指令の定数または信号ベースの入力に応じてリファレンス アプリケーションを構成できるように開ループ システムを実装します。 |
Environment
Environment サブシステムは、風や地面による力を生成します。このリファレンス アプリケーションには次の環境バリアントがあります。
| 環境 | バリアント | 説明 |
|---|---|---|
Ground Feedback |
| Simulation 3D Terrain Sensor ブロックを使用して、3D 環境に多点地形センサーを実装します。 |
| 一定の摩擦値を実装します。 |
Controllers
Controllers サブシステムは、エンジン トルク、トランスミッション ギア、ブレーキ圧力、および差圧の各指令を生成します。
ECU
ECU コントローラーは、エンジン トルク コマンドを生成します。このコントローラーでは、エンジン トルク コマンドをモデル ワークスペース変数 EngRevLim で指定された値に制限することで過度の空ぶかしを防止します。既定では、この値は 7000 rpm です。差分トルク指令がエンジン トルク コマンドの制限を超えると、ECU はエンジン トルク コマンドを指令差分トルクに設定します。
Transmission Control
Transmission Controller サブシステムは、トランスミッション ギア指令を生成します。このコントローラーには次のバリアントがあります。
| バリアント | 説明 |
|---|---|
| 開ループ トランスミッション制御。コントローラーはギア指令をギア要求に設定します。 |
| Stateflow® のロジックを使用して車両加速度、制動指令、車輪回転数、エンジン回転数、およびギア要求に基づいてギア指令を生成するトランスミッション制御モジュール (TCM) を実装します。 |
| 車両加速度とエンジン回転数を使用してギア指令を生成するパドル コントローラーを実装します。 |
| Stateflow のロジックを使用して車両加速度、車輪回転数、およびエンジン回転数に基づいてギア指令を生成するトランスミッション制御モジュール (TCM) を実装します。 |
Brake Pressure Control
Brake Controller サブシステムは、ブレーキ圧力指令を生成するための Brake Pressure Control サブシステムを実装します。Brake Pressure Control サブシステムには次のバリアントがあります。
| バリアント | 説明 |
|---|---|
| 2 つの状態を切り替えて車輪滑りを調整するアンチロック ブレーキ システム (ABS) フィードバック コントローラーを実装します。バンバン制御により、実際の滑りと望ましい滑りの間の誤差が最小限に抑えられます。望ましい滑りとして、コントローラーは mu スリップ曲線がピーク値に到達する滑り値を使用します。この望ましい滑り値は、制動距離が最小になる最適値です。 |
| 開ループ ブレーキ制御。コントローラーはブレーキ圧力指令を制動指令に基づく基準ブレーキ圧力に設定します。 |
| 操縦をシミュレートするときの 5 状態の ABS 制御。1,2,3 5 状態の ABS コントローラーでは、車輪減速度と車両加速度に基づく論理スイッチを使用して各車輪のブレーキ圧力を制御します。 操縦時の車輪のロックアップを防止したり、制動距離を短縮したり、ヨー安定性を維持したりするには、5 状態の ABS 制御の使用を検討してください。既定の ABS のパラメーターは、摩擦係数のスケーリング係数が 0.6 で一定である路面を想定して設定されています。 |
Active Differential Control
Active Differential Control サブシステムは、差圧指令を生成します。指令を計算するために、このサブシステムには次のバリアントがあります。
| バリアント | 説明 |
|---|---|
| 以下に基づいて差圧指令を生成するコントローラーを実装します。
|
| コントローラーを実装しません。差圧指令は 0 に設定されます。 |
Passenger Vehicle
Passenger Vehicle サブシステムには、エンジン、コントローラー、および四輪の車体が含まれます。具体的には、車両には次のサブシステムがあります。
| Body, Suspension, Wheels サブシステム | バリアント | 説明 |
|---|---|---|
PassVeh7DOF |
| 四輪の車両:
サブシステムには以下を含むタイヤのバリアントがあります。
|
PassVeh14DOF |
| 四輪の車両。
サブシステムには以下を含むサスペンションのバリアントがあります。
サブシステムには以下を含むタイヤのバリアントがあります。
|
| Engine サブシステム | バリアント | 説明 |
|---|---|---|
Mapped Engine |
| 火花点火 (SI) マップ エンジン |
Steering, Transmission, Driveline, and Brakes サブシステム | バリアント | 説明 | |
|---|---|---|---|
Driveline Ideal Fixed Gear | Driveline モデル | All Wheel Drive | 全輪駆動、前輪駆動、後輪駆動、または後輪駆動アクティブ デファレンシャルの動力伝達装置を構成し、トルク カップリングのタイプを指定します。 |
| |||
| |||
| |||
Transmission |
| 理想的な固定ギア トランスミッションを実装します。 | |
Brake Hydraulics | NA | コントローラーがシリンダーに制動指令を適用するときの油圧システムのヒューリスティックな応答を実装します。前輪と後輪のバイアス係数が含まれます。サブシステムは、加えられた圧力をシリンダーのスプール位置に変換します。ブレーキ圧力を生成するために、スプールからシリンダーの下流側にフローが適用されます。 | |
Visualization
シミュレーションを実行すると、Visualization サブシステムにより、ドライバー、車両、および応答の情報が提供されます。ステアリング、車両速度、エンジン回転数、横方向加速度などの車両信号のログが操縦時にリファレンス アプリケーションで記録されます。ログに記録された信号をシミュレーション データ インスペクターを使用してインポートし、そのデータを調べることができます。
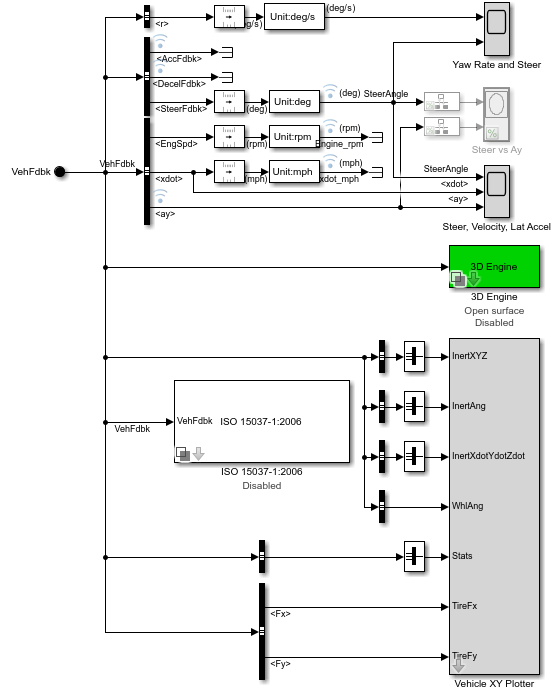
| 要素 | 説明 |
|---|---|
Driver Commands | ドライバーの指令:
|
Vehicle Response | 車両の応答:
|
Yaw Rate and Steer Scope ブロック | 時間に対するヨー レートおよびステアリング角度:
|
Steer vs Ay Scope ブロック | 横方向加速度に対するステアリング角度 |
Steer, Velocity, Lat Accel Scope ブロック |
|
Vehicle XY Plotter | 車両の横方向の距離に対する縦方向の距離のプロット |
ISO 15037-1:2006 ブロック | ステアリング ホイールの角度とトルク、縦方向と横方向の速度、横滑り角など、ISO 規格の測定信号をシミュレーション データ インスペクターに表示します。 |
3D 可視化
必要に応じて、3D 可視化環境を有効または無効にできます。3D 可視化エンジンのプラットフォームの要件やハードウェアの推奨事項については、Unreal Engine シミュレーション環境の要件と制限を参照してください。リファレンス アプリケーションを開いた後、Visualization サブシステムで 3D Engine ブロックを開きます。
メモ
3D 可視化環境でモデルのシミュレーションを実行するには、Simulink 3D Animation が必要です。
パラメーターを次のように設定します。
[3D エンジン] を [有効]。
[シーン] をいずれかのシーン (例:
[Straight road])。
シーン内に車両を配置するには、次を行います。
位置の初期化方法を選択します。
シーンに推奨 — 車両の初期位置をシーンの推奨される値に設定
ユーザー指定 — 車両の初期位置を独自に設定
[モデル ワークスペースを初期値で更新] をクリックして、モデル ワークスペースの車両の初期位置を適用される値で上書きします。
シミュレーションを実行すると、車両の応答が Simulation 3D Viewer に表示されます。
メモ
Simulation 3D Viewer を開くおよび閉じるには、Simulink の [実行] ボタンおよび [停止] ボタンを使用します。Simulation 3D Viewer を手動で閉じると、Simulink でシミュレーションが停止してエラーが表示されます。
3D 可視化環境を有効にしている場合、シミュレーションのステップを戻すことはできません。
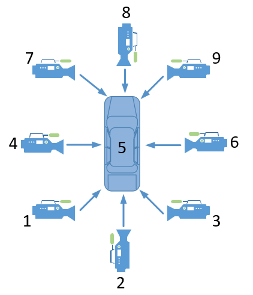
カメラ ビューを滑らかに切り替えるには、次のキーボード ショートカットを使用します。
| キーボード ショートカット | カメラ ビュー | |
|---|---|---|
1 | 左後方 |
|
2 | 後方 | |
3 | 右後方 | |
4 | 左 | |
5 | 内部 | |
6 | 右 | |
7 | 左前方 | |
8 | 前方 | |
9 | 右前方 | |
0 | 上 | |

その他のカメラ コントロールについては、次のキーボード ショートカットを使用します。
| キーボード ショートカット | カメラ コントロール |
|---|---|
| Tab | シーン内のすべての車両間でビューを切り替えます。 |
マウスのスクロール ホイール | 車両からのカメラの距離を制御します。 |
L | カメラのラグ効果のオンとオフを切り替えます。ラグ効果を有効にすると、カメラ ビューに以下が含まれます。
このラグにより、車両の加速と回転の全体的な可視化が改善されます。 |
| F | フリー カメラ モードのオンとオフを切り替えます。フリー カメラ モードを有効にすると、マウスを使用してカメラのピッチとヨーを変更できます。このモードを使用すると、車両の周りをカメラが旋回移動できます。 |




参照
[1] Pasillas-Lépine, William. "Hybrid modeling and limit cycle analysis for a class of five-phase anti-lock brake algorithms." Vehicle System Dynamics 44, no. 2 (2006): 173-188.
[2] Gerard, Mathieu, William Pasillas-Lépine, Edwin De Vries, and Michel Verhaegen. "Improvements to a five-phase ABS algorithm for experimental validation." Vehicle System Dynamics 50, no. 10 (2012): 1585-1611.
[3] Bosch, R. "Bosch Automotive Handbook." 10th ed. Warrendale, PA: SAE International, 2018.
参考
Longitudinal Driver | Mapped SI Engine | 3D Engine | Swept Sine Reference Generator | Simulation 3D Terrain Sensor