Simulation 3D Terrain Sensor
ライブラリ:
Vehicle Dynamics Blockset /
Vehicle Scenarios /
Sim3D /
Sim3D Vehicle /
Components
説明
メモ
Simulation 3D Terrain Sensor ブロックを含むモデルのシミュレーションには、Simulink® 3D Animation™ が必要です。
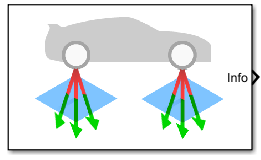
Simulation 3D Terrain Sensor ブロックは、Unreal Engine® に多点地形センサーを実装します。このブロックは、スピード バンプなど、変化する地形での高速車両の接触をモデル化するために使用します。このブロックは、タイヤの下の地形を検出するために、レイ トレーシングを実装します。このブロックのパラメーターは、次の目的で使用します。
Simulation 3D Vehicle ブロックおよび Simulation 3D Motorcycle ブロックで作成されたアクターなど、シーン内のあらゆる Simulation 3D 車両アクターの下の地形を検知します。
光線の原点、方向、および長さを構成して、シーンとテスト シナリオの地形センサー パターンを調整します。光線の長さはセンサーの範囲を指定します。光線の原点および方向はワールド座標系に従います。ここで、次のようになります。
"X" 軸は車両の前方向を指します。
"Y" 軸は車両の前進方向に向かって右方向を指します。
"Z" 軸は上方向を指します。
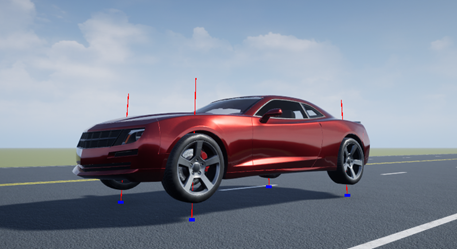
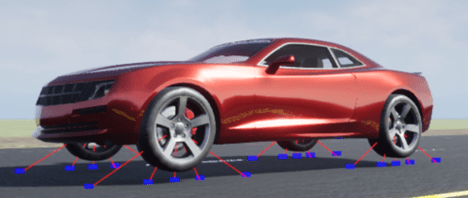
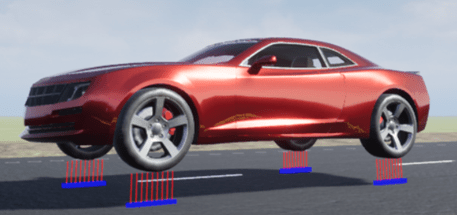
このブロックは、車両アクターの各車輪の地形センサー パターンを作成します。次の表は、特定のパターンに対応するパラメーター設定を示しています。
| パターン | 説明 | パラメーター設定 |
|---|---|---|
|
|
|
|
|
|
|
|
|
|
|
|

ヒント
Simulation 3D Scene Configuration ブロックが Simulation 3D Terrain Sensor ブロックの前に実行されることを確認します。これにより、Unreal Engine 3D 可視化環境で準備されたデータが Simulation 3D Terrain Sensor ブロックで受信されます。ブロックの実行順序を確認するには、ブロックを右クリックして [プロパティ] ボタン  をクリックします。[一般] タブで、[優先順位] の設定が次のようになっていることを確認します。
をクリックします。[一般] タブで、[優先順位] の設定が次のようになっていることを確認します。
Simulation 3D Scene Configuration —
0Simulation 3D Terrain Sensor —
1
実行順序の詳細については、実行順序の制御と表示を参照してください。
このブロックの [座標系] パラメーターは、3D 環境においてアクターの変換がどのように適用されるかを指定します。ブロックの出力も指定された座標系に従います。
例

一定半径リファレンス アプリケーション
一定半径旋回操縦における車両運動モデル全体をシミュレートする。車両運動の走行およびハンドリング解析やシャシー制御開発で、動的なステアリング応答などに使用する。

オートバイ縦断面ブレーキ テスト リファレンス アプリケーション
ブレーキ テストにおけるオートバイ断面モデルをシミュレート。オートバイ運動の走行およびハンドリング解析やシャシー制御開発に使用。