このページの内容は最新ではありません。最新版の英語を参照するには、ここをクリックします。
バーチャル車両の設定
バーチャル ビークル コンポーザー アプリを使用してバーチャル車両を構成します。まず、プロジェクトのパスと構成名、パワートレイン アーキテクチャ、モデル テンプレート、および車両運動を指定します。
バーチャル ビークル コンポーザー アプリの [Composer] タブで、[New]  をクリックします。アプリで既定のバーチャル車両テンプレートが開き、バーチャル車両のプロジェクト ファイルが作成されます。
をクリックします。アプリで既定のバーチャル車両テンプレートが開き、バーチャル車両のプロジェクト ファイルが作成されます。
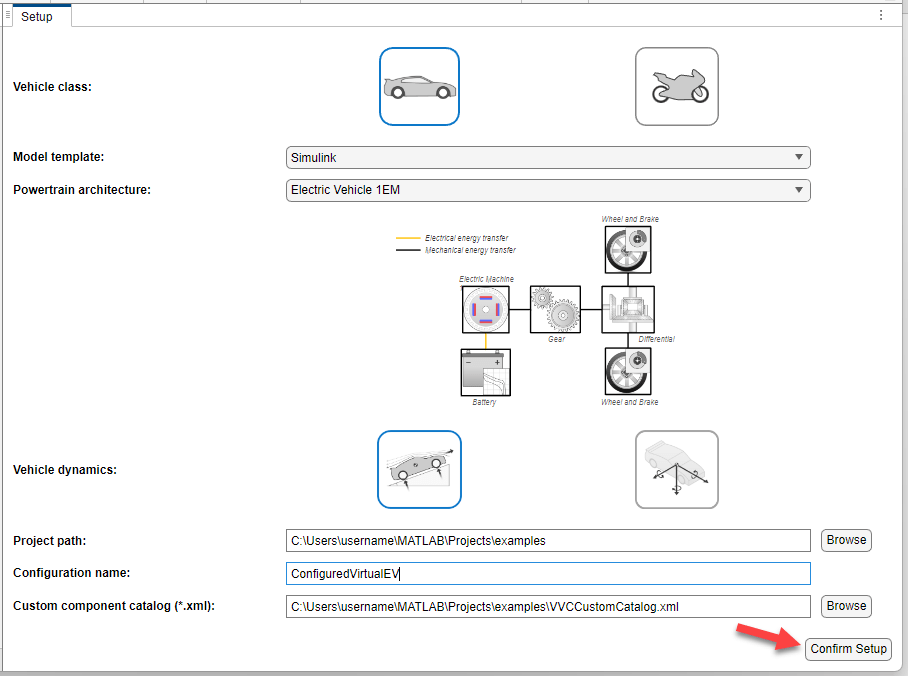
この例では、縦方向の車両運動をもつ Simulink® モデル テンプレートを使用して、単一のモーターを備えた四輪の電気自動車 (EV) を構成します。次を行います。
[Project path] を
C:\Users\に設定します。<user_name>\MATLAB\Projects\examples[Configuration name] を
ConfiguredVirtual_EVに設定します。[Vehicle class] を
Passenger carに設定します。[Powertrain Architecture] を
[Electric Vehicle 1EM]に設定します。[Model template] を
[Simulink]に設定します。[Vehicle dynamics] を
[Longitudinal vehicle dynamics]に設定します。
次に、[Configure] をクリックします。
この手順を完了したら、バーチャル車両データの構成を参照してください。
詳細
車両のクラス
[Vehicle class] パラメーターを使用して、四輪の [Passenger car] または二輪の [Motorcycle] を選択します。
パワートレイン アーキテクチャ
[Powertrain Architecture] パラメーターを設定します。オプションは、[Vehicle class] によって異なります。
[Passenger car] の既定のアーキテクチャは、内燃エンジンとトランスミッションを備えた [Conventional Vehicle] です。[Electric Vehicle 1EM] を選択して、単一モーター EV のパワートレインを指定することもできます。Powertrain Blockset™ がある場合は、他の EV アーキテクチャやハイブリッド電気自動車 (HEV) のアーキテクチャを指定できます。
[Motorcycle] の既定のアーキテクチャは、火花点火 (SI) エンジンを備えた [Conventional Motorcycle with Chain Drive] です。[Electric Motorcycle with Chain Drive] を選択して、EV アーキテクチャを指定することもできます。オートバイには、Vehicle Dynamics Blockset™、Simscape™、および Simscape アドオンが必要です。
モデル テンプレート
[Model template] パラメーターを使用して、[Simulink] または [Simscape] の車両プラントとパワートレイン アーキテクチャを指定します。[Passenger car] の既定は、[Simulink] モデル テンプレートです。[Motorcycle] では、[Simscape] モデル テンプレートが唯一のオプションです。
Simscape Driveline™ がある場合、[Passenger car] では、従来の車両をモデル化する Simscape サブシステムで車両プラントとパワートレイン アーキテクチャを構成できます。Simscape Driveline および Simscape Electrical™ がある場合は、EV と HEV をモデル化する Simscape サブシステムで車両プラントとパワートレイン アーキテクチャを構成できます。
[Motorcycle] を構成するには、Vehicle Dynamics Blockset、Simscape, Simscape Driveline、および Simscape Electrical が必要です。
車両運動
バーチャル車両の運動を構成するには、[Vehicle Dynamics] パラメーターを使用します。
[Passenger car] については、次のいずれかのオプションを選択します。

Longitudinal vehicle dynamics— 燃費やエネルギー管理の解析に適しています。
Combined longitudinal and lateral vehicle dynamics— Vehicle Dynamics Blockset がある場合は、車両のハンドリング、安定性、乗り心地の解析に適した運動を指定できます。
[Motorcycle] については、次のいずれかのオプションを選択します。

In-plane motorcycle dynamics— 燃費やエネルギー管理の解析に適しています。
Out-of-plane motorcycle dynamics— 車両のハンドリング、安定性、乗り心地の解析に適しています。
メモ
バーチャル車両では、SAE J670 および ISO 8855 の定義に従って Z が上向きの座標系が使用されます。
参考
関連するトピック
You can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)