バーチャル車両のシナリオおよびテストの構成
[Scenario and Test] ペインを使用して、バーチャル車両のテスト計画を構成します。使用可能なオプションは、バーチャル車両の [Powertrain architecture] と [Model template] のパラメーター設定によって異なります。
[Scenario] を [Drive Cycle] に設定すると、以下を選択できます。
業界機関や団体からの標準的なドライブ サイクル。既定では
FTP75ドライブ サイクルが選択されています。一部のドライブ サイクル (JC08やCUEDCなど) にはギア シフト スケジュールが含まれています。初期基準速度、定格基準速度、シミュレーション時間などの Wide Open Throttle (WOT) パラメーター。
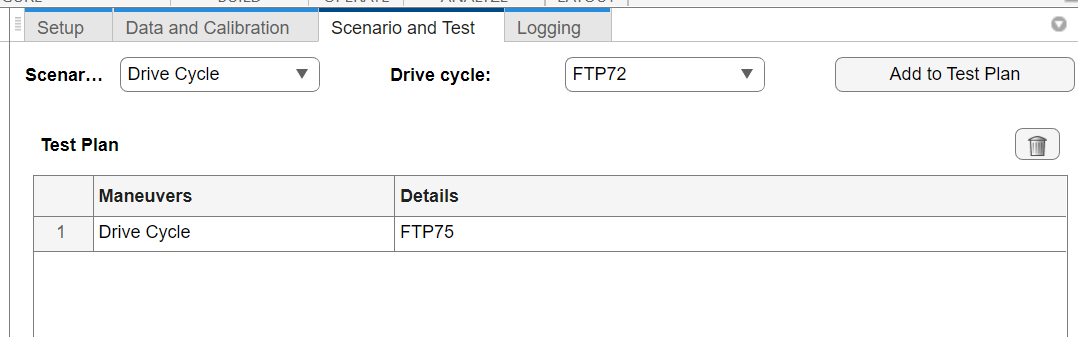
1 つ以上の既存のドライブ サイクルを選択するには、[Scenario and Test] タブをクリックして、次の手順に従います。
[Scenario] から
[Drive Cycle]を選択します。[Drive Cycle] からドライブ サイクルを選択します。
[Add to Test Plan] をクリックします。
[Combined longitudinal and lateral dynamics] (この例では適用不可) を選択した場合、[Scenario] でいくつかの車両ダイナミクス テストから選択することもできます。
この例では、既定の [FTP75] ドライブ サイクルを使用します。
テスト計画の各シナリオに既定の [Driver] モデルが割り当てられています。使用可能なオプションは、[Vehicle dynamics] パラメーターの設定によって異なります。
この例では、[Driver] を [Longitudinal Driver] に設定します。