このページの内容は最新ではありません。最新版の英語を参照するには、ここをクリックします。
バーチャル車両データの構成
この手順を実行する前に、1 台の電気モーターを備えた EV の設定を開始するバーチャル車両の設定を参照してください。
次に、[Data and Calibration] オプションを使用して、バーチャル車両のシャシー、タイヤ、ブレーキ タイプ、パワートレイン、環境、およびドライバーを構成します。使用可能なオプションは、バーチャル車両の [Powertrain architecture] と [Model template] のパラメーター設定によって異なります。
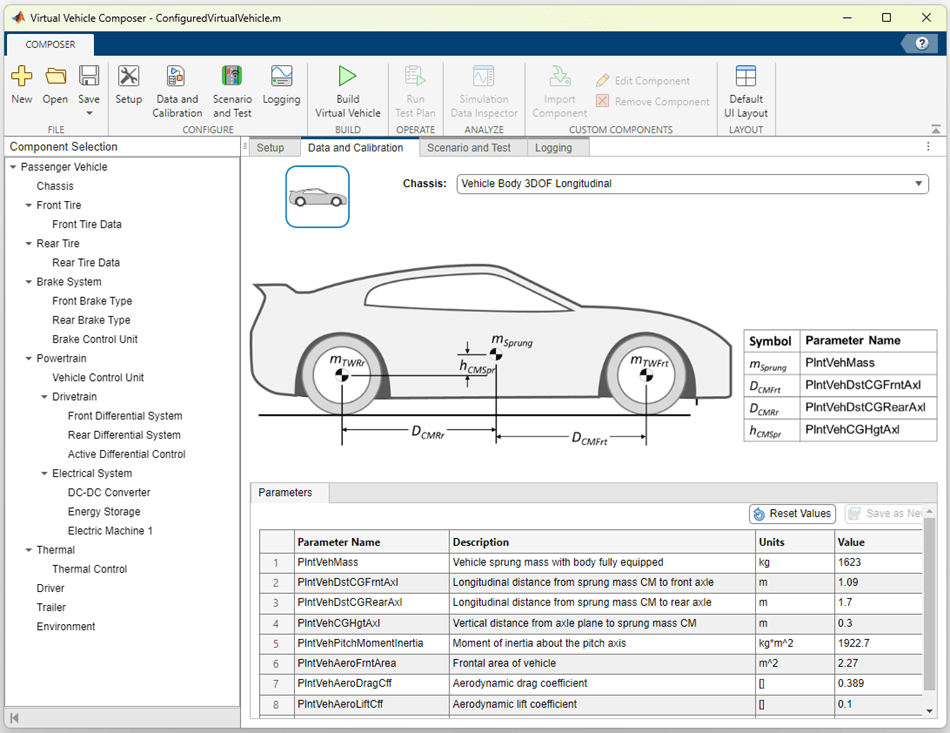
シャシー
[Chassis] パラメーターを使用して、車体のダイナミクスと質量特性を選択します。使用可能なオプションは、バーチャル車両の [Setup] 、 [Vehicle Dynamics] パラメーターによって異なります。
この例では、[Chassis] を [Vehicle Body 3DOF Longitudinal] に設定し、質量特性の既定値を使用します。
タイヤとブレーキ
[Tire] と [Brake Type] のオプションを使用して、タイヤとブレーキのパラメーターを指定します。
[Tire] を
[MF Tires Longitudinal]に設定して、ドライブ サイクル解析に適するタイヤ モデルを構成します。[Tire Data] タブで、バーチャル車両のタイヤのパラメーターを入力します。次が含まれます。
PlntWhlLdRadius— タイヤの負荷半径PlntWhlPrsFrnt— フロント タイヤ圧
この例では、既定のパラメーター値を使用します。
[Brake Type] を
[Disc]に設定します。バーチャル車両のブレーキのパラメーターを入力します。次が含まれます。
PlntBrkStcFricCffFrnt— フロント ブレーキの静止摩擦係数PlntBrkKinFricCffFrnt— フロント ブレーキの動摩擦係数
この例では、既定のパラメーター値を使用します。
パワートレイン
[Powertrain] タブで、バーチャル車両のエンジン、電気モーター、トランスミッション、ドライブトレイン、デファレンシャル システム、電気システムなど、パワートレイン システムのパラメーターを設定します。使用可能なオプションは、バーチャル車両の [Powertrain architecture] と [Model template] のパラメーター設定によって異なります。
この例では、[Powertrain] で次を行います。
[Vehicle Control Unit] を
[EV 1EM with BMS]に設定します。[Drivetrain] を
[Front Wheel Drive]に設定します。[Drivetrain] 、 [Front Differential System] を
[Open Differential]に設定します。[Electrical System] を
[Electrical System]に設定します。電気変換損失や、測定された効率など、[DC-DC Converter] のパラメーターを指定します。
PlntDCDCEff— コンバーター全体の効率PlntDCDCLossTbl— 変換損失
この例では、既定のパラメーター値を使用します。
[Electric Machine 1] 、 [Parameters] をクリックして、モーターのパラメーターを指定します。次が含まれます。
PlntEM1Spd— トルク テーブルにある回転速度のベクトルPlntEM1Trq— 対応する最大トルク値のベクトル
この例では、既定のパラメーター値を使用します。
[Energy Storage] をクリックしてから、
[Mapped Battery (Electric Vehicle 1EM)]を選択して、マッピングされたリチウムイオン バッテリー モデルのパラメーターを指定します。次が含まれます。PlntBattOpenCirctVolt— 開回路電圧テーブル データPlntBattVoltSocBpt— 開回路電圧ブレークポイント
この例では、既定のパラメーター値を使用します。
ドライバー
[Driver] タブで、ドライバーのパラメーターを設定します。使用可能なオプションは、バーチャル車両の [Powertrain architecture] と [Model template] のパラメーター設定によって異なります。
この例では、[Driver] を [Longitudinal Driver] に設定して、ドライブ サイクルの追跡に適するドライバーを実装します。
バーチャル車両のドライバー データを入力します。次が含まれます。
DriverPreviewDist— プレビュー距離DriverTimeConst— 時定数
この例では、既定のパラメーター値を使用します。
環境
[Environment] タブで、環境のパラメーターを設定します。[Environment] を [Standard Ambient] に設定します。
バーチャル車両の環境データを入力します。次が含まれます。
EnvAirTemp— 周囲空気の温度EnvWindVelX— 周囲の X 方向の風速
この例では、既定のパラメーター値を使用します。
この手順を完了したら、バーチャル車両のシナリオおよびテストの構成を参照してください。
参考
関連するトピック
You can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)