このページの内容は最新ではありません。最新版の英語を参照するには、ここをクリックします。
アプリケーション
Symbolic Math Toolbox は、解析的および数値的に高い精度で数式を解き、プロットし、操作するためのツールを提供します。シンボリック計算の結果から MATLAB® 関数、Simulink® Function ブロック、および Simscape™ 方程式を生成して、他のツールボックスで使用することもできます。これらのツールを使用して、アプリケーション固有のワークフローを実行します。
関連情報
注目の例
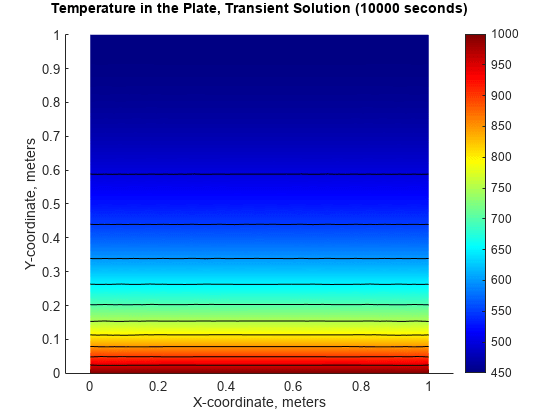
非線形熱伝導に関する偏微分方程式の求解
この例では、薄板の非線形熱伝導に関する偏微分方程式 (PDE) を解く方法を説明します。
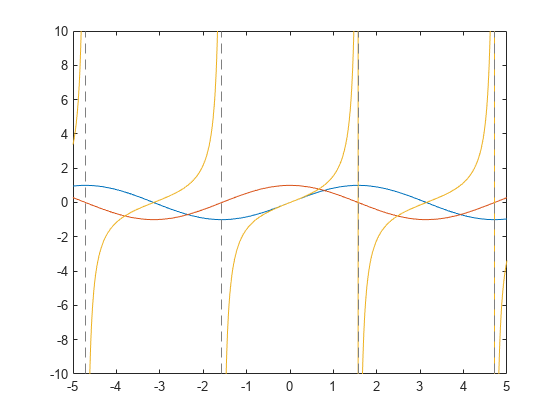
Symbolic Math Toolbox による解析プロット
Symbolic Math Toolbox は、数値データを明示的に生成することなく数式の解析プロットを提供します。
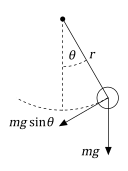
振子の周期的揺れの動きのシミュレーション
単純な振子の運動方程式を、小角について解析的に解き、任意の角度について数値的に解く。
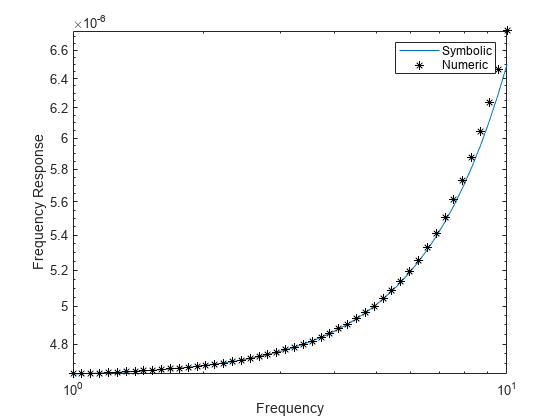
Simscape に対するカンチレバー トラス構造の解析モデル
この例では、静的領域と周波数領域の両方で、カンチレバー トラス構造におけるジョイントの変位に対するパラメーター化された解析式を求める方法を示します。

Analyze Transfer Function of T-Coil Circuit
Analyze the transfer function of a T-coil circuit using Symbolic Math Toolbox™ and Control System Toolbox™. In this example, you define symbolic equations, solve for the transfer function, and analyze the stability, frequency response, and step response of the circuit.
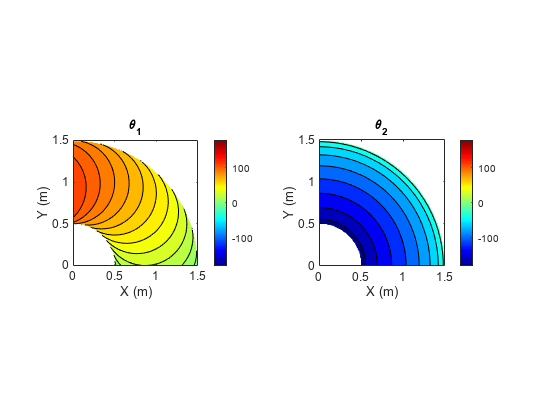
逆運動学の導出と 2 リンク ロボット アームへの適用
この例では、MATLAB と Symbolic Math Toolbox を使用し、逆運動学を導出して 2 リンク ロボット アームに適用する方法を示します。
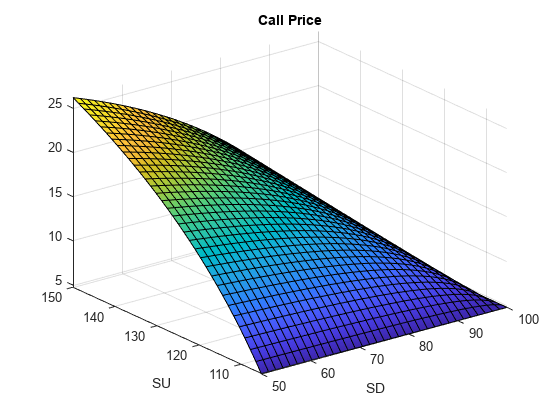
単一期間の資産裁定取引の調査
単一期間、2 状態の資産ポートフォリオにおける基本的な裁定取引についての概念を考察する。