減衰調和振動子の物理特性
この例では、駆動力がない場合の運動方程式を解くことにより、減衰調和振動子の物理特性を調べます。この例では、不足減衰、過減衰、および臨界減衰の各ケースについて調査します。

内容
運動方程式の導出
運動方程式 (F = 0) の求解
不足減衰のケース ()
過減衰のケース ()
臨界減衰のケース ()
まとめ
1.運動方程式の導出
以下に示す減衰での強制調和振動子を考えます。振動子が動く速度に比例した抵抗力をモデル化します。
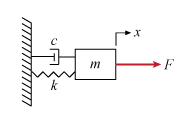
以下の場合の運動方程式を定義します。
が質量
が減衰係数
がバネ定数
が駆動力
syms x(t) m c k F(t) eq = m*diff(x,t,t) + c*diff(x,t) + k*x == F
eq(t) =
および を使用して方程式を書き換えます。
syms gamma omega_0 eq = subs(eq,[c k],[m*gamma m*omega_0^2])
eq(t) =
質量 を除算します。これで、分析に使いやすい形式の方程式が得られました。
eq = collect(eq,m)/m
eq(t) =
2.運動方程式 (F = 0) の求解
であるような、外力がない場合に、dsolve を使用して運動方程式を解きます。単位変位および速度ゼロの初期条件を使用します。
vel = diff(x,t); cond = [x(0) == 1, vel(0) == 0]; eq = subs(eq,F,0); sol = dsolve(eq,cond)
sol =
解を展開して単純化する方法を確認します。
sol = expand(sol)
sol =
各項には、、つまり の因数があることに注意してください。collect を使用してこれらの項を集約します。
sol = collect(sol,exp(-gamma*t/2))
sol =
項 は、解のさまざまな部分に現れます。減衰比 を導入することで、より単純な形式に書き換えます。
ζ を上記の項に代入すると、次の結果を得ます。
syms zeta; sol = subs(sol, ... sqrt(gamma^2 - 4*omega_0^2), ... 2*omega_0*sqrt(zeta^2-1))
sol =
および で を置き換えることで、解をさらに単純化します。
sol = subs(sol,gamma,2*zeta*omega_0)
sol =
駆動力のない減衰調和振動子の運動の一般解を得ました。次に、運動がより単純な形をとる、減衰比 の 3 つの特殊なケースについて検討します。これらのケースは以下のように呼ばれます。
不足減衰 、
過減衰 、および
臨界減衰 。
3.不足減衰のケース ()
の場合、 は純虚数です。
solUnder = subs(sol,sqrt(zeta^2-1),1i*sqrt(1-zeta^2))
solUnder =
上記の方程式内の項 に注目すると、 という恒等式が想起されます。
解を で書き換えます。
solUnder = coeffs(solUnder,zeta);
solUnder = solUnder(1);
c = exp(-omega_0*zeta*t);
solUnder = c*rewrite(solUnder/c,"cos")solUnder =
solUnder(t,omega_0,zeta) = solUnder
solUnder(t, omega_0, zeta) =
系は、 の固有振動数で振動し、 の指数関数的速度で減衰します。
と の関数として解を fplot でプロットします。
z = [0 1/4 1/2 3/4];
w = 1;
T = 4*pi;
lineStyle = {"-","--",":k","-."};
fplot(@(t) solUnder(t,w,z(1)),[0 T],lineStyle{1});
hold on;
for k = 2:numel(z)
fplot(@(t) solUnder(t,w,z(k)),[0 T],lineStyle{k});
end
hold off;
grid on;
xticks(T*linspace(0,1,5));
xticklabels({"0","\pi","2\pi","3\pi","4\pi"});
xlabel("\omega_0 t");
ylabel("amplitude");
lgd = legend("0","1/4","1/2","3/4");
title(lgd,"\zeta");
title("Underdamped");
4.過減衰のケース ()
の場合、 は純実数であり、解は次のように書き換えられます。
solOver = sol
solOver =
solOver = coeffs(solOver,zeta); solOver = solOver(1)
solOver =
項 に注目すると、 という恒等式が想起されます。
式を で書き換えます。
c = exp(-omega_0*t*zeta);
solOver = c*rewrite(solOver/c,"cosh")solOver =
solOver(t,omega_0,zeta) = solOver
solOver(t, omega_0, zeta) =
解をプロットし、振動なしで減衰することを確認します。
z = 1 + [1/4 1/2 3/4 1];
w = 1;
T = 4*pi;
lineStyle = {"-","--",":k","-."};
fplot(@(t) solOver(t,w,z(1)),[0 T],lineStyle{1});
hold on;
for k = 2:numel(z)
fplot(@(t) solOver(t,w,z(k)),[0 T],lineStyle{k});
end
hold off;
grid on;
xticks(T*linspace(0,1,5));
xticklabels({"0","\pi","2\pi","3\pi","4\pi"});
xlabel("\omega_0 t");
ylabel("amplitude");
lgd = legend("1+1/4","1+1/2","1+3/4","2");
title(lgd,"\zeta");
title("Overdamped");
5.臨界減衰のケース ()
の場合、解は次のように単純化されます。
solCritical(t,omega_0) = limit(sol,zeta,1)
solCritical(t, omega_0) =
臨界減衰のケースの解をプロットします。
w = 1; T = 4*pi; fplot(solCritical(t, w), [0 T]) xlabel("\omega_0 t"); ylabel("x"); title("Critically damped, \zeta = 1"); grid on; xticks(T*linspace(0,1,5)); xticklabels({"0","\pi","2\pi","3\pi","4\pi"});

6.まとめ
減衰比 を用いてその運動を表す ODE を解くことで、調和振動子の異なる減衰状態を調べました。3 つすべてのケースを一緒にプロットし、それらを比較して対比します。
zOver = pi;
zUnder = 1/zOver;
w = 1;
T = 2*pi;
lineStyle = {"-","--",":k"};
fplot(@(t) solOver(t,w,zOver),[0 T],lineStyle{1},LineWidth=2);
hold on;
fplot(solCritical(t, w), [0 T], lineStyle{2},LineWidth=2)
fplot(@(t) solUnder(t,w,zUnder),[0 T],lineStyle{3},LineWidth=2);
hold off;
textColor = lines(3);
text(3*pi/2,0.3 ,"over-damped" ,Color=textColor(1,:));
text(pi*3/4,0.05,"critically-damped",Color=textColor(2,:));
text(pi/8 ,-0.1,"under-damped");
grid on;
xlabel("\omega_0 t");
ylabel("amplitude");
xticks(T*linspace(0,1,5));
xticklabels({"0","\pi/2","\pi","3\pi/2","2\pi"});
yticks((1/exp(1))*[-1 0 1 2 exp(1)]);
yticklabels({"-1/e","0","1/e","2/e","1"});
lgd = legend("\pi","1","1/\pi");
title(lgd,"\zeta");
title("Damped Harmonic Oscillator");