setExternalInput
SimulationInput オブジェクトまたは Simulation オブジェクトを使用して、最上位の入力端子の外部入力データを指定する
説明
s = setExternalInput(s,indata)Simulink.SimulationInput オブジェクトまたは Simulation オブジェクトの s で外部入力データ indata を指定します。SimulationInput オブジェクトまたは Simulation オブジェクトで外部入力データを指定することは、そのオブジェクトを使用して実行するシミュレーションで [入力] パラメーターを構成することと等価です。モデルは初期化中に変更され、指定した外部入力データが読み込まれます。シミュレーションが完了すると、変更は元に戻ります。
最上位の入力端子で読み込むデータを指定することに加えて、関数 setExternalInput は以下を行います。
必要に応じて、
LoadExternalInputパラメーターおよびExternalInputパラメーターを指定する外部入力データを含む変数がシミュレーションで確実に使用できるようにする
シミュレーション用の外部入力データの読み込みに関するこれらの側面を明示的に管理するために、関数 setModelParameter または setVariable を使用する必要はありません。
例
関数 setExternalInput を使用して、Simulink.SimulationInput オブジェクトに保存されているシミュレーション構成の外部データを指定します。次に、関数 setBlockParameter を使用して、入力データを連続信号として読み込むように Inport ブロックを構成します。最後に、Simulink.SimulationInput オブジェクトを使用してシミュレーションを実行します。
モデル LoadInputData を開きます。モデルには、[ゲイン] 値が 2 の Gain ブロックに接続されている 1 つの Inport ブロックが含まれています。Gain ブロックの出力が Outport ブロックに接続されています。
mdl = "LoadInputData";
open_system(mdl)
モデルの Simulink.SimulationInput オブジェクトを作成します。
simIn = Simulink.SimulationInput(mdl);
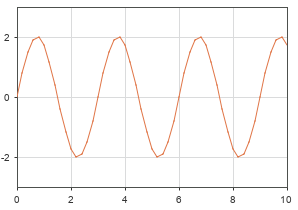
Inport ブロックを使用して読み込む入力データを作成します。この例では、時間値の等間隔のベクトルを使用して正弦波を表すデータを作成します。次に、関数 sin を使用して各時点の信号値を作成します。
sampleTime = 0.1; numSteps = 100; time = sampleTime*(0:numSteps); time = time'; data = sin(2*pi/3*time);
複数の形式を使用して、最上位の入力端子の外部入力データを指定できます。この例では、timetable 形式を使用します。timetable を作成するには、時間データが duration ベクトルでなければなりません。関数 seconds を使用して、秒を単位とする duration ベクトルを作成します。次に、timetable を作成します。
secs = seconds(time); inData = timetable(secs,data);
関数 setExternalInput を使用して、Simulink.SimulationInput オブジェクト simIn 内のシミュレーション構成に外部入力データ inData を追加します。
simIn = setExternalInput(simIn,inData);
Simulink.SimulationInput オブジェクトを使用して、ブロック パラメーター値、モデル コンフィギュレーション パラメーター値、変数値など、シミュレーションの他の側面を構成することもできます。
入力データを連続信号として読み込むように Inport ブロックを構成するとします。関数 setBlockParameter を使用して、[内挿] パラメーターを有効にし、ブロックの [サンプル時間] パラメーターを連続 (0) として指定します。
inBlk = mdl + "/Inport"; simIn = setBlockParameter(simIn,inBlk,"Interpolate","on"); simIn = setBlockParameter(simIn,inBlk,"SampleTime","0");
SimulationInput オブジェクトのコンフィギュレーションを使用してモデルをシミュレートします。
out = sim(simIn);
シミュレーションが実行され、入力データが連続信号として読み込まれます。
モデルに複数の最上位の入力端子が含まれている場合、各入力端子のデータをもつ要素を含む Simulink.SimulationData.Dataset オブジェクトとして読み込む入力データを指定できます。オブジェクトの最初の要素には端子番号 1 の入力端子のデータが含まれ、2 番目の要素には端子番号 2 の入力端子のデータが含まれるといったようになります。
データを含む変数を使用して読み込むデータを指定すると、指定した変数内のデータが Simulink.SimulationInput オブジェクトに追加されます。これにより、そのデータは、そのオブジェクトを使用して実行されるシミュレーションで使用できるようになります。
次の例では、SimulationInput オブジェクトを使用して構成されたシミュレーションに、3 つの最上位の入力端子のデータを読み込む方法を示します。各入力端子の入力データでは、使用可能な複数の形式を示すために異なる形式を使用しています。
モデル InportLoading を開きます。モデルには、3 つの Outport ブロックに直接接続された 3 つの Inport ブロックが含まれています。
mdl = "InportLoading";
open_system(mdl)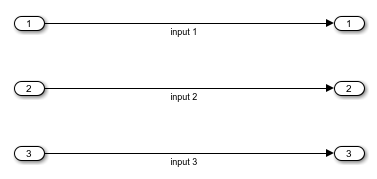
関数 createInputDataset を使用して、モデルの各入力端子の要素を格納する Dataset オブジェクトを作成します。
inDS = createInputDataset(mdl,'UpdateDiagram',true);既定では、関数 createInputDataset で作成された Dataset オブジェクトには、要素ごとにプレースホルダー timeseries オブジェクトが含まれます。各入力端子の入力データを作成して、プレースホルダー データを置き換えます。
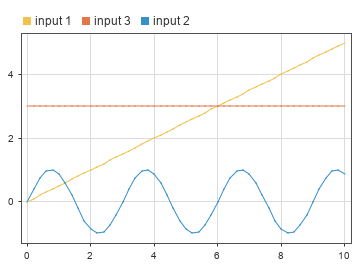
最初の入力端子では、傾きが 0.5 のラインを表すデータをもつ timeseries オブジェクトを作成します。時間データで、サンプル時間 (間隔) として 0.5 を使用して、等間隔の時間ベクトルを作成します。信号値を作成するために、時間ベクトルに 0.5 を乗算します。
sampleTime = 0.5; numSteps = 20; time = sampleTime*(0:numSteps)'; data = 0.5*time; lineTS = timeseries(data,time);
2 番目の入力端子で、正弦波を表すデータをもつ timetable を作成します。
正弦波で、サンプル時間として
0.1を使用して、等間隔の時間ベクトルを作成します。信号値を作成するために、関数
sinを使用します。timetableを作成するには、時間入力がdurationベクトルでなければなりません。関数secondsを使用して、時間値を秒単位のdurationベクトルに変換します。timetableを作成します。
sampleTime = 0.1; numSteps = 100; time = sampleTime*(0:numSteps)'; sinVals = sin(2*pi/3*time); secs = seconds(time); sinTT = timetable(secs,sinVals);
3 つ目の入力端子で、値 3 の定数のデータを含む構造体を作成します。入力データの読み込みのために、構造体の形式にフィールド time と signals が含まれています。signals フィールドは構造体の配列です。各構造体のフィールド values 内に、信号のデータが含まれています。この例では、構造体で 1 つの入力端子の入力データが指定されているため、配列 signals の要素は 1 つだけです。
constStruct.time = [0 10]'; constStruct.signals.values = [3 3]';
プレースホルダー データを、各入力端子に作成したデータに置き換えます。
inDS{1} = lineTS;
inDS{2} = sinTT;
inDS{3} = constStruct;Simulink.SimulationInput オブジェクトを作成してモデルのシミュレーションを構成します。
simIn = Simulink.SimulationInput(mdl);
関数 setExternalInput を使用し、Dataset オブジェクトを使用して 3 つすべての入力端子で読み込む入力データを指定します。関数は変数 inDs を SimulationInput オブジェクトに追加します。
simIn = setExternalInput(simIn,inDS);
SimulationInput オブジェクトを使用してモデルをシミュレートします。
out = sim(simIn);
シミュレーションが実行され、SimulationInput オブジェクトで指定した入力データが読み込まれます。
入力引数
出力引数
ヒント
[入力] パラメーターではなくブロック パラメーターで指定されたデータを読み込むブロック用に外部入力データを指定するには、ブロックの入力データ パラメーターを変数として指定します。次に、関数
setVariableを使用して、SimulationInputオブジェクトまたはSimulationオブジェクトで変数の値を指定します。たとえば、From Workspace ブロックで読み込むデータを指定するには、From Workspace ブロックの [データ] パラメーターを変数として指定します。次に、関数
setVariableを使用して、変数の値を指定します。ファイルから入力データを読み込むには、入力データを含むファイルにシミュレーションからアクセスできることを確認してください。関数
parsimおよびbatchsimを使用してシミュレーションを実行すれば、名前と値の引数AttachedFilesを使用してファイルをワーカーに送信できます。