Simulink.sdi.enablePCTSupport
並列シミュレーションからシミュレーション データ インスペクターにデータをインポートするタイミングを制御
説明
Simulink.sdi.enablePCTSupport( は、mode)mode によって指定されたモードに従って、並列ワーカーからシミュレーション データ インスペクターへのデータ インポートを設定します。シミュレーション データ インスペクターは、ローカル ワーカーのデータのみ、またはローカル ワーカーとリモート ワーカーのデータをインポートするように設定できます。モードを手動に設定することもできます。これにより、関数 Simulink.sdi.sendWorkerRunToClient を使用して実行をシミュレーション データ インスペクターに手動でインポートできます。既定では、シミュレーション データ インスペクターは手動インポート モードに設定されています。
例
ローカル ワーカーとリモート ワーカーの両方から出力を自動的にインポートするようにシミュレーション データ インスペクターの並列ワーカー サポートを設定します。
Simulink.sdi.enablePCTSupport("all")Parallel Computing Toolbox™ ワーカーからの出力がシミュレーション データ インスペクターに自動的にインポートされるのを防ぐには、手動サポート モードを指定します。
Simulink.sdi.enablePCTSupport("manual")この例では、並列ワーカーを使用して作成された実行をSimulink.sdi.sendWorkerRunToClientを使用して手動でシミュレーション データ インスペクターに送信する方法について説明します。
設定
この例では、Gain ブロックの値 Mu を変化させて、vdp モデルの複数のシミュレーションを実行します。並列シミュレーションを設定するには、Mu 値のベクトルを定義し、手動による Parallel Computing Toolbox™ のサポート用にシミュレーション データ インスペクターを設定します。
MuVals = [0.1 0.2 0.3 0.4];
Simulink.sdi.enablePCTSupport("manual");並列ワーカーの初期化
parpool (Parallel Computing Toolbox)を使用して 4 つの並列ワーカーのプールを開始します。この例では if ステートメント内の parpool を呼び出すため、作成するのは並列プールのみです (まだない場合)。
p = gcp("nocreate"); if isempty(p) parpool(4); end
spmd (Parallel Computing Toolbox)を使用してすべてのワーカーに共通の初期化コードを実行できます。たとえば、vdp モデルを読み込み、関数 Simulink.sdi.markSignalForStreaming でシミュレーション データ インスペクターにログを記録する信号を選択します。parfor 内の sim でシミュレーションを実行する場合にデータの同時実行の問題を回避するには、各ワーカーに一時ディレクトリを作成します。
spmd load_system("vdp") Simulink.sdi.markSignalForStreaming("vdp/x1",1,"on") Simulink.sdi.markSignalForStreaming("vdp/x2",1,"on") workDir = pwd; addpath(workDir) tempDir = tempname; mkdir(tempDir) cd(tempDir) end
parfor を使用した並列シミュレーションの実行
並列ワーカーからシミュレーション データ インスペクターにデータをストリーミングするには、parfor (Parallel Computing Toolbox)を使用して並列シミュレーションを実行します。各ワーカーは Mu の異なる値を使用して vdp シミュレーションを実行します。parfor ループの内容にはアクセスできないため、変数 MuVal がワーカーのワークスペースで定義されます。この場合、assigninを使用して vdp モデルで内容を表示できます。
parfor (index = 1:4) assignin("base","MuVal",MuVals(index)); set_param("vdp/Mu","Gain","MuVal") sim("vdp");
データにアクセスしてクライアント MATLAB に実行を送信
クライアント MATLAB® で使用する場合と同じ方法で、ワーカーでシミュレーション データ インスペクターのプログラムによるインターフェイスを使用できます。この例では、Simulink.sdi.Runオブジェクトを作成し、Tag プロパティを使用したシミュレーションで使われた Mu の値を付加します。
IDs = Simulink.sdi.getAllRunIDs;
lastIndex = length(IDs);
runID = Simulink.sdi.getRunIDByIndex(lastIndex);
parRun = Simulink.sdi.getRun(runID);
parRun.Tag = strcat("Mu = ",num2str(MuVals(index)));
Simulink.sdi.sendWorkerRunToClient
end一時ディレクトリを閉じてシミュレーション データ インスペクターで実行を表示
シミュレーションが完了したら、別の spmd セクションを使用してワーカーで作成された一時ディレクトリを削除します。
spmd cd(workDir) rmdir(tempDir,"s") rmpath(workDir) end
各シミュレーションで、関数 Simulink.sdi.sendWorkerRunToClient はすべてのワーカーからシミュレーション データ インスペクターに実行をインポートしました。データを表示して実行プロパティを確認し、シミュレーション中に使われた Mu の値を確認できます。
Simulink.sdi.view
さまざまな入力フィルターの時定数でモデル slexAircraftExample の並列シミュレーションを実行し、シミュレーション データ インスペクターのプログラムによるインターフェイスを使用してさまざまな方法でデータにアクセスします。
設定
シミュレーション データ インスペクターが空であり、Parallel Computing Toolbox™ のサポートがローカル ワーカーで作成された実行を自動的にインポートするように構成されていることを確認します。次に、各シミュレーションで使用するフィルター パラメーター値のベクトルを作成します。
Simulink.sdi.clear
Simulink.sdi.enablePCTSupport("local")
Ts_vals = [0.01, 0.02, 0.05, 0.1, 0.2, 0.5, 1]; 並列ワーカーの初期化
並列シミュレーションを実行するローカル ワーカーのプールを未作成の場合は、関数 gcp を使用して作成します。spmd コード ブロックで、slexAircraftExample モデルを読み込み、ログに記録する信号を選択します。sim を parfor で使用する際のデータの同時実行の問題を回避するには、シミュレーション中に使用する一時ディレクトリをワーカーごとに作成します。
p = gcp;
Starting parallel pool (parpool) using the 'Processes' profile ... 15-Oct-2025 09:16:17: Job Queued. Waiting for parallel pool job with ID 1 to start ... 15-Oct-2025 09:17:17: Job Queued. Waiting for parallel pool job with ID 1 to start ... Connected to parallel pool with 4 workers.
spmd % Load system and select signals to log load_system("slexAircraftExample") Simulink.sdi.markSignalForStreaming("slexAircraftExample/Pilot", 1, "on") Simulink.sdi.markSignalForStreaming("slexAircraftExample/Aircraft Dynamics Model", 4, "on") % Create temporary directory on each worker workDir = pwd; addpath(workDir) tempDir = tempname; mkdir(tempDir) cd(tempDir) end
並列シミュレーションの実行
parfor を使用して 7 つのシミュレーションを並列実行します。各シミュレーションの Ts の値を選択し、モデル ワークスペースで Ts の値を変更します。次に、シミュレーションを実行し、Simulink.sdi.WorkerRun オブジェクトの配列を作成して、シミュレーション データ インスペクターでデータにアクセスします。parfor ループの後、別の spmd セグメントを使用して一時ディレクトリをワーカーから削除します。
parfor index = 1:7 % Select value for Ts Ts_val = Ts_vals(index); % Change the filter time constant and simulate modelWorkspace = get_param("slexAircraftExample","modelworkspace"); assignin(modelWorkspace,"Ts",Ts_val) sim("slexAircraftExample"); % Create a worker run for each simulation workerRun(index) = Simulink.sdi.WorkerRun.getLatest end spmd % Remove temporary directories cd(workDir) rmdir(tempDir, "s") rmpath(workDir) end
並列シミュレーション出力から Dataset オブジェクトを取得
関数 getDataset で WorkerRun オブジェクトから Dataset オブジェクトにデータを格納することで、簡単に後処理できるようになります。
ds(7) = Simulink.SimulationData.Dataset; for a = 1:7 ds(a) = getDataset(workerRun(a)); end ds(1)
ans =
Simulink.SimulationData.Dataset '' with 12 elements
Name BlockPath
__________ ________________________________________
1 [1x1 State ] '' slexAircraftExample/Actuator Model
2 [1x1 Signal] alpha, rad ...rcraftExample/Aircraft Dynamics Model
3 [1x1 State ] '' ...cs Model/Pitch Channel/Integrate qdot
4 [1x1 State ] '' ...mics Model/Vertical Channel/Integrate
5 [1x1 State ] '' ...ntroller/Alpha-sensor Low-pass Filter
6 [1x1 State ] '' ...ller/Integrator/Continuous/Integrator
7 [1x1 State ] '' ...ple/Controller/Pitch Rate Lead Filter
8 [1x1 State ] '' ...aftExample/Controller/Stick Prefilter
9 [1x1 State ] '' .../Dryden Wind Gust Models/Q-gust model
10 [1x1 State ] '' .../Dryden Wind Gust Models/W-gust model
11 [1x1 Signal] Stick slexAircraftExample/Pilot
12 [1x1 Signal] alpha, rad slexAircraftExample/alpha, rad
- Use braces { } to access, modify, or add elements using index.
並列シミュレーション出力から DatasetRef オブジェクトを取得
ビッグ データのワークフローの場合は、関数 getDatasetRef を使用して WorkerRun に関連付けられているデータを参照します。
for b = 1:7 datasetRef(b) = getDatasetRef(workerRun(b)); end datasetRef(1)
ans =
DatasetRef with properties:
Name: 'Run <run_index>: <model_name>'
Run: [1×1 Simulink.sdi.Run]
numElements: 12
シミュレーション データ インスペクターで並列シミュレーション データを処理
ローカルの Simulink.sdi.Run オブジェクトを作成し、シミュレーション データ インスペクターのプログラムによるインターフェイスを使用してデータの解析と可視化を行うこともできます。この例では、各実行に対するフィルター時定数値を示すタグを示します。
for c = 1:7 Runs(c) = getLocalRun(workerRun(c)); Ts_val_str = num2str(Ts_vals(c)); desc = strcat("Ts = ", Ts_val_str); Runs(c).Description = desc; Runs(c).Name = strcat("slexAircraftExample run Ts=", Ts_val_str); end
ワーカー リポジトリをクリーンアップ
ワーカーが使用したファイルをクリーンアップし、ワーカー プールで実行するその他のシミュレーション用にディスク容量を解放します。
Simulink.sdi.cleanupWorkerResources
入力引数
並列ワーカーで記録されたデータに関するシミュレーション データ インスペクターのデータ インポート モード。次のいずれかのオプションとして指定します。
"manual"— 並列ワーカーで作成された実行を自動的にインポートしません。並列ワーカーで作成された実行を関数Simulink.sdi.sendWorkerRunToClientを使用して手動でインポートできます。"local"— ローカル ワーカーで作成された実行を自動的にインポートします。"all"— ローカル ワーカーおよびリモート ワーカーで作成された実行を自動的にインポートします。
データ型: char | string
代替機能
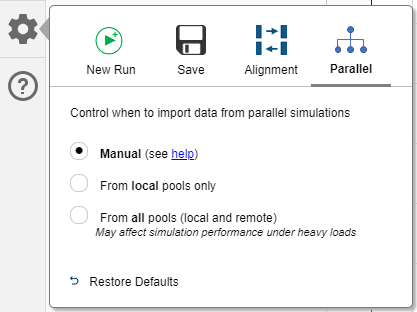
[基本設定] 、 [並列] を選択することで、シミュレーション データ インスペクターで並列計算サポート モードを変更することができます。
バージョン履歴
R2017b で導入R2020a 以降、関数 Simulink.sdi.enablePCTSupport では 'none' 入力オプションをサポートしなくなりました。並列ワーカーで記録されたデータのシミュレーション データ インスペクターへの自動インポートを無効にするには、'manual' オプションを使用します。
R2020a 以降、関数 Simulink.sdi.enablePCTSupport は論理入力を無視します。関数 Simulink.sdi.enablePCTSupport に対して論理入力を指定するスクリプトでは、0 または false 入力を 'manual' 入力オプションで置き換え、1 または true 入力を 'all' オプションで置き換えることで同等の動作が得られます。
R2018a 以降、Simulink.sdi.enablePCTSupport の入力値が次に変更されました。
'local''none''all''manual'
R2017b では、関数 Simulink.sdi.enablePCTSupport は、並列シミュレーションで記録されたデータに対するシミュレーション データ インスペクターのサポートを有効または無効にするために論理入力を受け入れていました。
trueまたは1は、すべての並列ワーカーからシミュレーション データ インスペクターへのデータの自動インポートのサポートを有効にします。R2018a では、同じ動作に対して
'all'オプションを使用します。ローカル ワーカーからのみデータを自動でインポートする必要がある場合は、新しい'local'入力を使用することもできます。falseまたは0は、並列ワーカーで記録されたデータのインポートのサポートをすべて無効にします。R2018a では、同じ動作に対して
'none'オプションを使用します。ワーカーでデータを解析して、個々の実行を並列ワーカーからシミュレーション データ インスペクターにインポートするかどうかを判断する場合は、新しい'manual'オプションを使用することもできます。
MATLAB Command
You clicked a link that corresponds to this MATLAB command:
Run the command by entering it in the MATLAB Command Window. Web browsers do not support MATLAB commands.
Web サイトの選択
Web サイトを選択すると、翻訳されたコンテンツにアクセスし、地域のイベントやサービスを確認できます。現在の位置情報に基づき、次のサイトの選択を推奨します:
また、以下のリストから Web サイトを選択することもできます。
最適なサイトパフォーマンスの取得方法
中国のサイト (中国語または英語) を選択することで、最適なサイトパフォーマンスが得られます。その他の国の MathWorks のサイトは、お客様の地域からのアクセスが最適化されていません。
南北アメリカ
- América Latina (Español)
- Canada (English)
- United States (English)
ヨーロッパ
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)