isstable
フィルターが安定であるかどうかの判定
構文
説明
flag = isstable(B,A,"ctf")B と分母係数 A によってCascaded Transfer Functions (CTF) として指定されるフィルターが安定している場合、1 を返します。 (R2024b 以降)
flag = isstable(d)d が安定している場合、1 が返されます。d を周波数応答仕様に基づいて生成するには、designfilt を使用します。
例
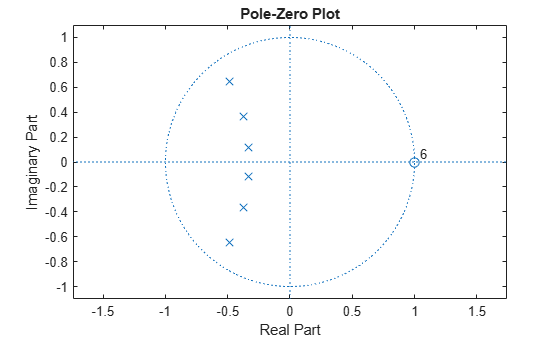
2 次セクションを使用して、6 次のバタワース ハイパス IIR フィルターを設計します。正規化された 3 dB の周波数、0.7 を指定します。フィルターが安定しているかどうかを判別します。
[z,p,k] = butter(6,0.7,"high");
SOS = zp2sos(z,p,k);
flag = isstable(SOS) flag = logical
1
zplane(z,p)
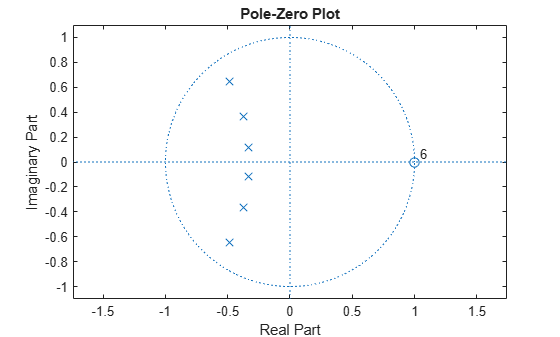
designfiltを使用してフィルターを再設計し、その安定性をチェックします。
d = designfilt("highpassiir", ... DesignMethod="butter",FilterOrder=6, ... HalfPowerFrequency=0.7); dflg = isstable(d)
dflg = logical
1
zplane(d)
フィルターを作成し、その安定性を倍精度と単精度で確認します。
b = [1 -0.5]; a = [1 -0.999999999]; act_flag1 = isstable(b,a)
act_flag1 = logical
1
act_flag2 = isstable(single(b),single(a))
act_flag2 = logical
0
R2024b 以降
阻止帯域エッジ周波数が 0.4、阻止帯域の減衰量が 50 dB の 40 次ローパス チェビシェフ II 型デジタル フィルターを設計します。CTF 形式のフィルター係数を使用して、フィルターが安定しているかどうかを確認します。
[B,A] = cheby2(40,50,0.4,"ctf"); flag = isstable(B,A,"ctf")
flag = logical
1
通過帯域エッジ周波数が 0.3 と 0.7、通過帯域リップルが 0.1 dB、阻止帯域の減衰量が 50 dB の 30 次バンドパス楕円デジタル フィルターを設計します。CTF 形式のフィルター係数とゲインを使用して、フィルターが安定しているかどうかを確認します。
[B,A,g] = ellip(30,0.1,50,[0.3 0.7],"ctf"); flag = isstable({B,A,g},"ctf")
flag = logical
1
入力引数
出力引数
詳細
ヒント
スケーリング ゲインを含むフィルターを CTF 形式で取得できます。butter、cheby1、cheby2、ellip などのデジタル IIR フィルター設計関数の出力を使用します。これらの関数で、"ctf" フィルタータイプ引数を指定し、スケール値を取得するために B、A、g を返すように指定します。 (R2024b 以降)
参照
[1] Lyons, Richard G. Understanding Digital Signal Processing. Upper Saddle River, NJ: Prentice Hall, 2004.
拡張機能
バージョン履歴
R2013a で導入参考
ctffilt | designfilt | digitalFilter | isallpass | islinphase | ismaxphase | isminphase | zplane